

【導(dǎo)讀】在未來的某個時候,人們必定能夠相對自如地運(yùn)用人工智能,安全地駕車出行。這個時刻何時到來我無法預(yù)見;但我相信,彼時“智能”會顯現(xiàn)出更“切實”的意義。
與此同時,通過深度學(xué)習(xí)方法,人工智能的實際應(yīng)用能夠在汽車安全系統(tǒng)的發(fā)展進(jìn)步中發(fā)揮重要的作用。而這些系統(tǒng)遠(yuǎn)不止僅供典型消費(fèi)者群體掌握和使用。
深度學(xué)習(xí)這一概念在幾十年前就已提出,但如今它與特定的應(yīng)用程序、技術(shù)以及通用計算平臺上的可用性能更密切相關(guān)。深度學(xué)習(xí)的“深度”層面源于輸入層和輸出層之間實現(xiàn)的隱含層數(shù)目,隱含層利用數(shù)學(xué)方法處理(篩選/卷積)各層之間的數(shù)據(jù),從而得出最終結(jié)果。在視覺系統(tǒng)中,深度(vs.寬度)網(wǎng)絡(luò)傾向于利用已識別的特征,通過構(gòu)建更深的網(wǎng)絡(luò)最終來實現(xiàn)更通用的識別。這些多層的優(yōu)點是各種抽象層次的學(xué)習(xí)特征。
例如,若訓(xùn)練深度卷積神經(jīng)網(wǎng)絡(luò)(CNN)來對圖像進(jìn)行分類,則第一層學(xué)習(xí)識別邊緣等最基本的東西。下一層學(xué)習(xí)識別成形的邊緣的集合。后續(xù)圖層學(xué)習(xí)識別諸如眼或鼻這樣的形狀的集合,而最后一層將學(xué)習(xí)甚至更高階(如面部)的特征。多層更擅長進(jìn)行歸納,因為它們可以學(xué)習(xí)原始數(shù)據(jù)和高級分類之間的所有中間特征。如圖1所示,這種跨越多層的歸納對于最終用例是有利的,如對交通標(biāo)志進(jìn)行分類,或者盡管存在墨鏡、帽子和/或其他類型的障礙物,也可能識別特定面部。
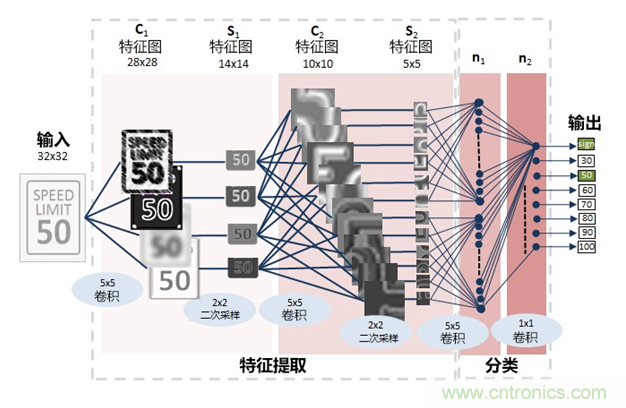
圖 1:簡易交通標(biāo)志示例
深度學(xué)習(xí)的“學(xué)習(xí)”層面源于對分層網(wǎng)絡(luò)如何在給定大量已知輸入及其期望輸出的情況下產(chǎn)生更準(zhǔn)確結(jié)果(圖2)所需的訓(xùn)練(反向傳播)的迭代。這種學(xué)習(xí)減少了那些迭代產(chǎn)生的錯誤,并最終獲得分層函數(shù)的結(jié)果,以滿足整體系統(tǒng)需求,并為目標(biāo)應(yīng)用程序提供極其穩(wěn)健的解決方案。這種學(xué)習(xí)/分層/互連類型類似于生物神經(jīng)系統(tǒng),因此支持人工智能的概念。
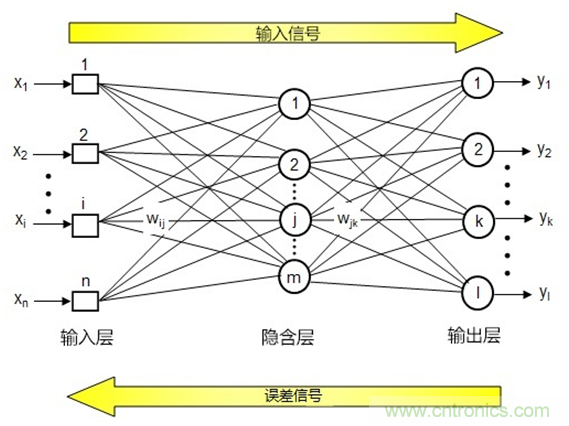
圖 2:簡易反向傳播示例
盡管深度學(xué)習(xí)具有效力,但其在實際應(yīng)用中也遇到了一些挑戰(zhàn)。對于容易受到系統(tǒng)限制因素(如總體成本、功耗和擴(kuò)展計算能力)影響的嵌入式應(yīng)用程序而言,在設(shè)計支持深度學(xué)習(xí)功能的系統(tǒng)時必須考慮這些限制因素。開發(fā)人員可以使用前端工具,如Caffe(最初由加州大學(xué)伯克利分校開發(fā)的深度學(xué)習(xí)框架)或TensorFlow(谷歌的發(fā)明)來開發(fā)總網(wǎng)絡(luò)、層和相應(yīng)的功能,以及目標(biāo)最終結(jié)果的培訓(xùn)和驗證。完成此操作后,針對嵌入式處理器的工具可將前端工具的輸出轉(zhuǎn)換為可在該嵌入式器件上或該嵌入式器件中執(zhí)行的軟件。
TI深度學(xué)習(xí)(TIDL)框架(圖3)支持在TI TDAx汽車處理器上運(yùn)行的深度學(xué)習(xí)/基于CNN的應(yīng)用程序,以在高效的嵌入式平臺上提供極具吸引力的高級駕駛輔助系統(tǒng)(ADAS)功能。
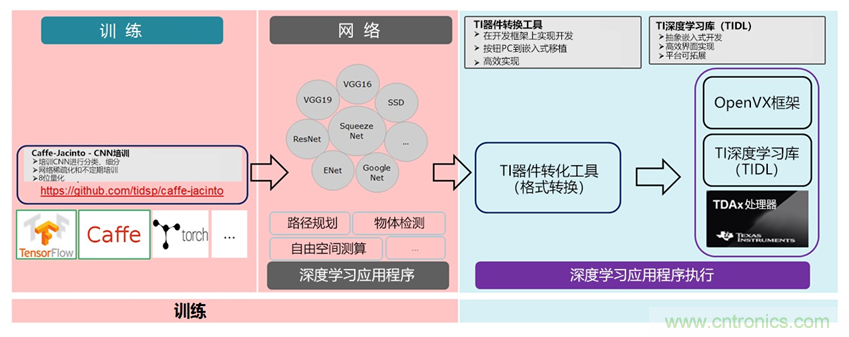
圖 3:TIDL框架(TI器件轉(zhuǎn)換器和深度學(xué)習(xí)庫)
TIDL框架為軟件可擴(kuò)展性提供快速嵌入式開發(fā)和平臺抽象;在TI硬件上實現(xiàn)用于加速CNN的高度優(yōu)化的內(nèi)核,以及支持從開放框架(如Caffe和TensorFlow)到使用TIDL應(yīng)用程序編程界面的嵌入式框架進(jìn)行網(wǎng)絡(luò)轉(zhuǎn)換的轉(zhuǎn)換器。
有關(guān)此解決方案的更多詳細(xì)信息,請閱讀白皮書“TIDL:嵌入式低功耗深度學(xué)習(xí),” 并查看其它資源中的視頻。
其他資源:
● 觀看基于深度學(xué)習(xí)的語義分割的現(xiàn)場演示:
● 嵌入式視覺聯(lián)盟的現(xiàn)場演示.
● 在TDA處理器上.
● TDA2和TDA3處理器上的EuroNCAP前置攝像頭。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進(jìn)行處理。
推薦閱讀:



