

【導(dǎo)讀】作為一門新興的動(dòng)作捕捉技術(shù),慣性動(dòng)捕的出現(xiàn),打破了光學(xué)動(dòng)捕占據(jù)市場絕對主導(dǎo)的行業(yè)格局,被視為動(dòng)作捕捉界的新生力量?;趹T性傳感器系統(tǒng)的動(dòng)作捕捉技術(shù)是一項(xiàng)融合了傳感器技術(shù)、無線傳輸、人體動(dòng)力學(xué)、計(jì)算機(jī)圖形學(xué)等多種學(xué)科的綜合性技術(shù),技術(shù)門檻要求很高。雖然慣性動(dòng)作捕捉技術(shù)出現(xiàn)的時(shí)間并不長,但隨著它在各行業(yè)中的使用,其卓越的性能很快就顯示出來了。
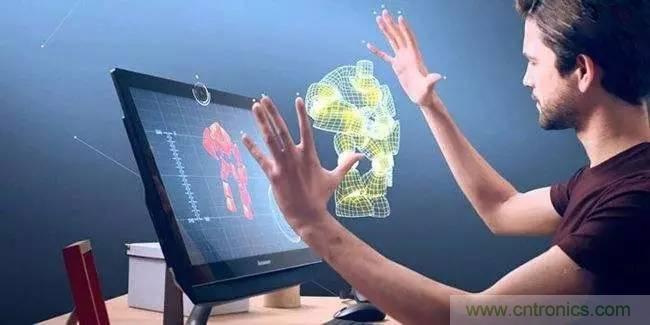
慣性動(dòng)作捕捉,是一種新型的人體動(dòng)作捕捉技術(shù),它用無線動(dòng)作姿態(tài)傳感器采集身體部位的姿態(tài)方位,利用人體運(yùn)動(dòng)學(xué)原理恢復(fù)人體運(yùn)動(dòng)模型,同時(shí)采用無線傳輸?shù)姆绞綄?shù)據(jù)呈現(xiàn)在電腦軟件里。
慣性動(dòng)作捕捉系統(tǒng)出現(xiàn)之前,最常見的是光學(xué)動(dòng)捕技術(shù)。它是通過在演員身上貼marker點(diǎn),然后用高速攝像機(jī)來捕捉marker點(diǎn)的準(zhǔn)確位移,再將捕捉數(shù)據(jù)傳輸?shù)诫娔X設(shè)備上,由此完成動(dòng)作捕捉的全過程。光學(xué)動(dòng)捕的整套設(shè)備的成本極為昂貴,架設(shè)繁瑣,易受遮擋或光干擾的影響,給后期處理工作帶來很多麻煩。對于一些遮擋嚴(yán)重的動(dòng)作來說,光學(xué)動(dòng)捕無法準(zhǔn)確實(shí)時(shí)還原例如下蹲、擁抱、扭打等動(dòng)作。而基于慣性傳感器系統(tǒng)的動(dòng)作捕捉技術(shù)的出現(xiàn),大大改善了這一現(xiàn)狀。
和光學(xué)動(dòng)捕技術(shù)相比,慣性動(dòng)作捕捉技術(shù)有著對捕捉環(huán)境的高適應(yīng)性,它的技術(shù)優(yōu)勢、成本優(yōu)勢和使用便捷的優(yōu)勢,使得它在各行業(yè)有著優(yōu)異的表現(xiàn)。在影視動(dòng)畫、體驗(yàn)式互動(dòng)游戲、虛擬演播室、真人模擬演練、體育訓(xùn)練、醫(yī)療康復(fù)等領(lǐng)域,慣性動(dòng)作捕捉系統(tǒng)都有著明顯優(yōu)于其他設(shè)備的特點(diǎn)。
慣性式動(dòng)作捕捉系統(tǒng)原理
動(dòng)作捕捉系統(tǒng)的一般性結(jié)構(gòu)主要分為三個(gè)部分:數(shù)據(jù)采集設(shè)備、數(shù)據(jù)傳輸設(shè)備、數(shù)據(jù)處理單元,慣性式動(dòng)作捕捉系統(tǒng)即是將慣性傳感器應(yīng)用到數(shù)據(jù)采集端,數(shù)據(jù)處理單元通過慣性導(dǎo)航原理對采集到的數(shù)據(jù)進(jìn)行處理,從而完成運(yùn)動(dòng)目標(biāo)的姿態(tài)角度測量。

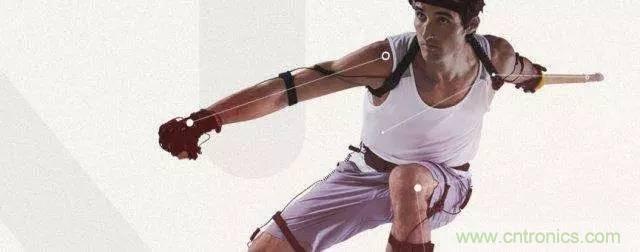
在運(yùn)動(dòng)物體的重要節(jié)點(diǎn)佩戴集成加速度計(jì),陀螺儀和磁力計(jì)等慣性傳感器設(shè)備,傳感器設(shè)備捕捉目標(biāo)物體的運(yùn)動(dòng)數(shù)據(jù),包括身體部位的姿態(tài)、方位等信息,再將這些數(shù)據(jù)通過數(shù)據(jù)傳輸設(shè)備傳輸?shù)綌?shù)據(jù)處理設(shè)備中,經(jīng)過數(shù)據(jù)修正、處理后,最終建立起三維模型,并使得三維模型隨著運(yùn)動(dòng)物體真正、自然地運(yùn)動(dòng)起來。
經(jīng)過處理后的動(dòng)捕數(shù)據(jù),可以應(yīng)用在動(dòng)畫制作,步態(tài)分析,生物力學(xué),人機(jī)工程等領(lǐng)域。
加速度計(jì),陀螺儀和磁力計(jì)在慣性動(dòng)作捕捉系統(tǒng)中的作用
加速計(jì)是用來檢測傳感器受到的加速度的大小和方向的,它通過測量組件在某個(gè)軸向的受力情況來得到結(jié)果,表現(xiàn)形式為軸向的加速度大小和方向(XYZ),但用來測量設(shè)備相對于地面的擺放姿勢,則精確度不高,該缺陷可以通過陀螺儀得到補(bǔ)償。
陀螺儀的工作原理是通過測量三維坐標(biāo)系內(nèi)陀螺轉(zhuǎn)子的垂直軸與設(shè)備之間的夾角,并計(jì)算角速度,通過夾角和角速度來判別物體在三維空間的運(yùn)動(dòng)狀態(tài)。它的強(qiáng)項(xiàng)在于測量設(shè)備自身的旋轉(zhuǎn)運(yùn)動(dòng),但不能確定設(shè)備的方位。而又剛好磁力計(jì)可以彌補(bǔ)這一缺陷,它的強(qiáng)項(xiàng)在于定位設(shè)備的方位,可以測量出當(dāng)前設(shè)備與東南西北四個(gè)方向上的夾角。

在動(dòng)作捕捉系統(tǒng)中,陀螺儀傳感器用于處理旋轉(zhuǎn)運(yùn)動(dòng),加速計(jì)用來處理直線運(yùn)動(dòng),磁力計(jì)用來處理方向。通俗易懂地講——陀螺儀知道“我們是否轉(zhuǎn)了身”,加速計(jì)知道“我們運(yùn)動(dòng)多長距離”,而磁力計(jì)則知道“我們的運(yùn)動(dòng)方向”。
在動(dòng)作捕捉系統(tǒng)中三種傳感器充分利用各自的特長,來跟蹤目標(biāo)物體的運(yùn)動(dòng)。
慣性動(dòng)作捕捉技術(shù)的優(yōu)勢
技術(shù)優(yōu)勢
慣性式動(dòng)作捕捉系統(tǒng)采集到的信號量少,便于實(shí)時(shí)完成姿態(tài)跟蹤任務(wù),解算得到的姿態(tài)信息范圍大、靈敏度高、動(dòng)態(tài)性能好;對捕捉環(huán)境適應(yīng)性高,不受光照、背景等外界環(huán)境干擾,并且克服了光學(xué)動(dòng)捕系統(tǒng)攝像機(jī)監(jiān)測區(qū)域受限的缺點(diǎn);克服了VR設(shè)備常有的遮擋問題,可以準(zhǔn)確實(shí)時(shí)地還原如下蹲、擁抱、扭打等動(dòng)作。此外,慣性式動(dòng)作捕捉系統(tǒng)還可以實(shí)現(xiàn)多目標(biāo)捕捉。
使用便捷的優(yōu)勢
使用方便,設(shè)備小巧輕便,便于佩戴。

成本優(yōu)勢
相比于光學(xué)動(dòng)作捕捉成本低廉,使得其不但可以應(yīng)用于影視、游戲等行業(yè),也有利于推動(dòng)VR設(shè)備更快地走進(jìn)大眾生活。
總的來說,慣性式動(dòng)作捕捉技術(shù)有著對捕捉環(huán)境的高適應(yīng)性,它的技術(shù)優(yōu)勢、成本優(yōu)勢和使用便捷的優(yōu)勢,使得它在影視動(dòng)畫、體驗(yàn)式互動(dòng)游戲、虛擬演播室、真人模擬演練、體育訓(xùn)練、醫(yī)療康復(fù)等領(lǐng)域都有著優(yōu)異的表現(xiàn)。
慣性式動(dòng)作捕捉系統(tǒng)的劣勢及解決
一般情況下慣性式動(dòng)作捕捉系統(tǒng)采用MEMS三軸陀螺儀、三軸加速度計(jì)和三軸磁力計(jì)組成的慣性測量單元(IMU,Inertial Measurement Unit)來測量傳感器的運(yùn)動(dòng)參數(shù)。而由IMU所測得的傳感器運(yùn)動(dòng)參數(shù)有嚴(yán)重噪聲干擾,MEMS 器件又存在明顯的零偏和漂移,慣性式動(dòng)作捕捉系統(tǒng)無法長時(shí)間地對人體姿態(tài)進(jìn)行精確的跟蹤。只有解決了這一個(gè)問題,才能使慣性式動(dòng)作捕捉系統(tǒng)在VR行業(yè)充分發(fā)揮作用。
針對慣性捕捉技術(shù)劣勢的解決方案
首先對IMU所測得的傳感器運(yùn)動(dòng)數(shù)據(jù)做預(yù)處理,濾掉原始慣性數(shù)據(jù)中摻雜的噪聲干擾;
然后不斷地進(jìn)行標(biāo)定和校準(zhǔn),即不斷地對各慣性器件進(jìn)行相應(yīng)的補(bǔ)償以解決MEMS器件的零偏和漂移,提高其數(shù)據(jù)的精確度和可靠程度;
接下來在進(jìn)行姿態(tài)解算,并利用姿態(tài)參考系統(tǒng)驗(yàn)證姿態(tài)角度數(shù)據(jù)的精確度,最終實(shí)現(xiàn)整個(gè)慣性式動(dòng)作捕捉。
此外,與之不同的是,國內(nèi)的G-Wearables則采用IK+室內(nèi)定位技術(shù)做主動(dòng)作捕捉算法,使用慣性式動(dòng)作捕捉做輔助算法。這套方案中利用室內(nèi)定位技術(shù)對慣性式動(dòng)作捕捉技術(shù)做實(shí)時(shí)校準(zhǔn),避免了不斷校準(zhǔn)的麻煩。

IK算法
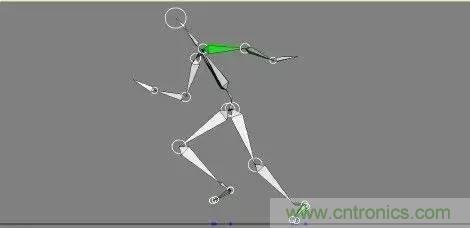
IK是Inverse Kinematics的縮寫,即反向運(yùn)動(dòng)學(xué)。在人體分層結(jié)構(gòu)中,關(guān)節(jié)和骨骼實(shí)際構(gòu)成了運(yùn)動(dòng)鏈,比如肩關(guān)節(jié)、肘關(guān)節(jié)、腕關(guān)節(jié)及其子骨骼就是一條運(yùn)動(dòng)鏈,是整個(gè)人體運(yùn)動(dòng)鏈上的一條分支,身體即是利用運(yùn)動(dòng)鏈對運(yùn)動(dòng)進(jìn)行控制。運(yùn)動(dòng)分為正向運(yùn)動(dòng)和反向運(yùn)動(dòng)。已知鏈上各個(gè)關(guān)節(jié)旋轉(zhuǎn)角,求各關(guān)節(jié)的位置信息和末端效應(yīng)器(end effector)的位置信息,這是正向運(yùn)動(dòng)學(xué)的問題;而己知末端效應(yīng)器的位置信息,反求其祖先關(guān)節(jié)的旋轉(zhuǎn)角和位置,這是就是反向運(yùn)動(dòng)學(xué)。
反向運(yùn)動(dòng)學(xué)根據(jù)決定運(yùn)動(dòng)的幾個(gè)主關(guān)節(jié)最終角度確定整個(gè)骨架的運(yùn)動(dòng),通常用于環(huán)節(jié)物體,由不同運(yùn)動(dòng)約束的關(guān)節(jié)連接成環(huán)節(jié)構(gòu)成的分級結(jié)構(gòu)骨架。分級結(jié)構(gòu)骨架由許多采用分級方式組的環(huán)節(jié)鏈構(gòu)成,包括分級結(jié)構(gòu)關(guān)節(jié)或鏈,運(yùn)動(dòng)約束和效應(yīng)器,由效應(yīng)器帶動(dòng)所有部分同時(shí)運(yùn)動(dòng)。但必須遵循特定的等級關(guān)系,以便在變換時(shí)阻止各個(gè)部件向不同方向散開。如:投球動(dòng)作,只規(guī)定出球的起始位置、終了位置和路徑,手臂等即跟隨關(guān)節(jié)的轉(zhuǎn)動(dòng)可按反向運(yùn)動(dòng)學(xué)自動(dòng)算出。反向運(yùn)動(dòng)學(xué)方法在一定程度上減輕了正向運(yùn)動(dòng)學(xué)方法的繁瑣工作,是生成逼真關(guān)節(jié)運(yùn)動(dòng)的最好方法之一。
IK算法在動(dòng)作捕捉系統(tǒng)中的應(yīng)用
如果己知末端效應(yīng)器的位置信息,反求其祖先關(guān)節(jié)的旋轉(zhuǎn)角和位置,這是就是反向運(yùn)動(dòng)學(xué)。也就是我們通過室內(nèi)定位技術(shù),獲取末端效應(yīng)器的位置信息,然后利用IK算法推算出祖先關(guān)節(jié)的旋轉(zhuǎn)角和位置,從而知道運(yùn)動(dòng)者的運(yùn)動(dòng)信息,再利用運(yùn)動(dòng)信息實(shí)現(xiàn)實(shí)時(shí)動(dòng)作跟蹤顯示。

利用激光定位技術(shù)通過墻上的激光發(fā)射器掃描佩戴者佩戴的機(jī)身上的位置追蹤傳感器(即IK算法中的末端效應(yīng)器),從而獲得位置和方向信息。具體來說,該室內(nèi)定位技術(shù)是靠激光和光敏傳感器來確定運(yùn)動(dòng)物體的位置。若干個(gè)激光發(fā)射器會(huì)被安置在對角,形成一個(gè)矩形區(qū)域,這個(gè)區(qū)域可以根據(jù)實(shí)際空間大小進(jìn)行調(diào)整。每個(gè)激光發(fā)射器內(nèi)設(shè)計(jì)有兩個(gè)掃描模塊,分別在水平和垂直方向輪流對定位空間發(fā)射橫豎激光掃描定位空間。運(yùn)動(dòng)者身上有光敏傳感器,通過光敏傳感器接收到激光的時(shí)間計(jì)算出光敏傳感器的準(zhǔn)確位置。
通過激光室內(nèi)定位技術(shù)獲取傳感器的精確位置后,即可利用IK算法反向推算出祖先關(guān)節(jié)的旋轉(zhuǎn)角和位置,從而知道運(yùn)動(dòng)者的運(yùn)動(dòng)信息。但是由于激光定位過程中可能存在遮擋問題,比如下蹲、擁抱、扭打等動(dòng)作。于是應(yīng)用慣性傳感器做補(bǔ)充跟蹤,即當(dāng)出現(xiàn)遮擋情況時(shí),IK+室內(nèi)定位相結(jié)合的動(dòng)作捕捉技術(shù)無法完全準(zhǔn)確的實(shí)現(xiàn),這個(gè)時(shí)候利用慣性式動(dòng)作捕捉技術(shù)做補(bǔ)充。反過來可以利用室內(nèi)定位技術(shù)對慣性式動(dòng)作捕捉技術(shù)做實(shí)時(shí)校準(zhǔn),不需要另行校準(zhǔn),從而解決遮擋問題的同時(shí),也避免了慣性式動(dòng)作捕捉無法長時(shí)間精確工作的弊端。
慣性捕捉技術(shù)的應(yīng)用領(lǐng)域
在影視制作、動(dòng)漫制作、游戲制作領(lǐng)域的應(yīng)用
就影視制作而言,慣性動(dòng)捕設(shè)備的加入,不但大大提高了拍攝效率,而且降低了后期處理的難度和成本。

我們知道,光學(xué)動(dòng)捕設(shè)備無法兼顧實(shí)時(shí)性與還原性,甚至一些特殊動(dòng)作也無法實(shí)時(shí)還原,同時(shí)還會(huì)受空間的限制。與之相比,慣性傳感器動(dòng)作捕捉系統(tǒng)就大為不同。慣性動(dòng)捕不但可識別的場景更多,而且管理起來也更加智能。利用全無線傳感器來完成電影拍攝過程中的動(dòng)作捕捉,絲毫不影響演員的穿戴,而且能夠保證演員腳步真實(shí)平穩(wěn)地移動(dòng),使運(yùn)動(dòng)還原自然流暢,甚至一些大動(dòng)態(tài)動(dòng)作也能順利捕捉。作為目前市面上性能卓越、易用精準(zhǔn)的動(dòng)作捕捉系統(tǒng),基于慣性傳感器系統(tǒng)的動(dòng)作捕捉設(shè)備一經(jīng)上市就頗受青睞。

在動(dòng)漫制作、游戲制作方面,現(xiàn)在很多游戲制作中角色的動(dòng)作設(shè)置,例如武打游戲里的劈砍等動(dòng)作,都是通過動(dòng)作捕捉來獲取的。正是因?yàn)閼T性動(dòng)捕有著良好的實(shí)時(shí)性和各種技術(shù)優(yōu)勢,所以這項(xiàng)技術(shù)在動(dòng)漫、游戲中得以廣泛的應(yīng)用,它使動(dòng)畫畫面更加逼真、自然,游戲角色的行動(dòng)更為自然細(xì)膩,對動(dòng)畫品質(zhì)的提升大有裨益。
在虛擬現(xiàn)實(shí)交互體驗(yàn)、游戲互動(dòng)領(lǐng)域的應(yīng)用
真人與虛擬角色的實(shí)時(shí)互動(dòng),是動(dòng)作捕捉技術(shù)的一大應(yīng)用。例如虛擬演播室、電影實(shí)時(shí)預(yù)演、真人與虛擬游戲角色互動(dòng)等。

虛擬演播室現(xiàn)在已經(jīng)很成熟了,在很多電視臺的欄目中都可以看到類似的場景,基本操作方式就是先讓主持人在綠色的幕布下進(jìn)行拍攝,再實(shí)時(shí)地用摳背機(jī)把人物扣下來附著到虛擬的場景當(dāng)中。一般的慣性動(dòng)捕由于虛擬角色位移的原因,沒辦法實(shí)現(xiàn)主持人與虛擬角色的交互,但隨著技術(shù)的進(jìn)步,優(yōu)秀的慣性動(dòng)作捕捉設(shè)備已經(jīng)能夠做到這一點(diǎn),不但動(dòng)捕位移誤差極小,而且可以做到來回運(yùn)動(dòng)數(shù)十米或者隨意運(yùn)動(dòng)持續(xù)十分鐘,完全能夠滿足虛擬演播室內(nèi)主持人與虛擬角色的互動(dòng)。
關(guān)于這一技術(shù)的應(yīng)用,最新的例證是關(guān)于2014年世界杯節(jié)目的。CCTV5的“我愛世界杯”和CNTV的“超級世界杯”兩檔節(jié)目都用到了慣性動(dòng)捕技術(shù)。在這兩檔節(jié)目的演播廳內(nèi),設(shè)置了擬真度極高的虛擬球員,在播出的節(jié)目中,虛擬球員和現(xiàn)場嘉賓及主持人進(jìn)行了很好的實(shí)時(shí)互動(dòng),其演播方式令觀眾耳目一新。

從更前沿的視角出發(fā),動(dòng)作捕捉技術(shù)真正能夠產(chǎn)生革命性價(jià)值的領(lǐng)域?qū)?huì)誕生在虛擬現(xiàn)實(shí)游戲上。例如,利用慣性傳感器實(shí)現(xiàn)的動(dòng)作捕捉和頭戴式顯示設(shè)備結(jié)合,可以使游戲從客廳或固定場景向更自由的場景延伸,動(dòng)作的精度也能產(chǎn)生質(zhì)的提升。目前,眾多游戲界的領(lǐng)軍企業(yè)都愿意嘗試使用慣性傳感器動(dòng)作捕捉設(shè)備,而據(jù)業(yè)內(nèi)預(yù)測,超過70個(gè)游戲可能會(huì)采用這一設(shè)備進(jìn)行體驗(yàn)。這就預(yù)示著慣性動(dòng)捕技術(shù)在未來動(dòng)捕界會(huì)迎來廣闊市場前景。
在多人模擬仿真演練領(lǐng)域的應(yīng)用
慣性動(dòng)作捕捉系統(tǒng)能夠?yàn)檐婈?duì)訓(xùn)練和消防演練提供虛擬仿真環(huán)境、野外演習(xí)、角色扮演訓(xùn)練等。虛擬軍事環(huán)境仿真可以使大批教員和學(xué)員在不進(jìn)入真實(shí)野戰(zhàn)環(huán)境中即可完成訓(xùn)練,這樣就能極大地節(jié)省人力物力及其他方面的消耗。目前,慣性動(dòng)作捕捉技術(shù)已經(jīng)被應(yīng)用于世界領(lǐng)先的軍事模擬訓(xùn)練系統(tǒng)開發(fā)中,并且起到了很好的仿真演練效果。

在體育訓(xùn)練及運(yùn)動(dòng)分析領(lǐng)域的應(yīng)用
在動(dòng)作分析和運(yùn)動(dòng)醫(yī)學(xué)研究領(lǐng)域,研究者需要對大量的運(yùn)動(dòng)數(shù)據(jù)進(jìn)行分析,比如速度、加速度、角速度等。這些數(shù)據(jù)不但非常龐大,而且經(jīng)常會(huì)被較大的視角、較遠(yuǎn)的距離、人為理解的偏差等因素影響。慣性傳感器動(dòng)作捕捉系統(tǒng)在原理上徹底解決了上述問題,它可以精確捕捉運(yùn)動(dòng)人體的動(dòng)作細(xì)節(jié),為運(yùn)動(dòng)員和教練分析運(yùn)動(dòng)情況提供依據(jù)。在這方面不乏成功的案例出現(xiàn)。例如針對高爾夫運(yùn)動(dòng)者的姿勢矯正產(chǎn)品MySwing。使用這款產(chǎn)品時(shí),用戶把產(chǎn)品夾在球桿上,便可捕捉到揮桿節(jié)奏、速度,桿頭軌跡、角度等數(shù)據(jù),這些數(shù)據(jù)可以幫助鍛煉者改進(jìn)姿勢,提高球技。

另外,利用慣性動(dòng)捕可以計(jì)算出打籃球時(shí)的運(yùn)球次數(shù)、傳球次數(shù)、投籃次數(shù)、籃板球數(shù)量等;也可計(jì)算出打臺球時(shí)的擊球次數(shù)、進(jìn)球概率等,使體育教學(xué)與訓(xùn)練進(jìn)入數(shù)字化時(shí)代,大幅提高訓(xùn)練水平。同時(shí)它使遠(yuǎn)程教學(xué)成為可能,尤其適合具有要求特殊的運(yùn)動(dòng),如帆船、攀巖等??偟膩碚f,利用慣性動(dòng)作捕捉設(shè)備獲取的這種實(shí)時(shí)且準(zhǔn)確的分析、評估數(shù)據(jù),在提高運(yùn)動(dòng)成績、預(yù)防損傷、狀態(tài)恢復(fù)等方面都有很大的幫助。
在醫(yī)療健康虛擬體驗(yàn)領(lǐng)域的應(yīng)用
慣性動(dòng)作捕捉技術(shù)還可以應(yīng)用到醫(yī)療診斷、姿態(tài)矯正、復(fù)健輔助、運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)仿真評估等方面,不但效果顯著,而且為醫(yī)療機(jī)構(gòu)提供了高效、低成本的解決方案。例如,對于骨病患者或行動(dòng)不便者,慣性動(dòng)作捕捉系統(tǒng)可提供全身、半身以及個(gè)別部位的測量及報(bào)告,醫(yī)生對傳感器傳輸?shù)臄?shù)據(jù)加以分析,可以為患者提供迅速簡潔的解決方案。

目前,國內(nèi)的一些醫(yī)療實(shí)驗(yàn)室已經(jīng)開始嘗試用慣性動(dòng)捕開發(fā)來幫助癲癇病人進(jìn)行診斷和康復(fù)訓(xùn)練。醫(yī)生判斷病人病情時(shí),傳統(tǒng)的做法是靠目測病人的步態(tài)和體征來下結(jié)論,而動(dòng)作捕捉的設(shè)備則更加精準(zhǔn)和智能,它借助數(shù)字化的精密測量方式更加客觀地進(jìn)行數(shù)據(jù)統(tǒng)計(jì)和診斷,并提供客觀準(zhǔn)確的數(shù)據(jù)來反映病人的治療效果。
另外,通過對步態(tài)的量化分析,慣性動(dòng)作捕捉技術(shù)可以提供實(shí)時(shí)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),這對假肢的研發(fā)、最優(yōu)安裝和安全使用提供較為準(zhǔn)確的各項(xiàng)依據(jù)。
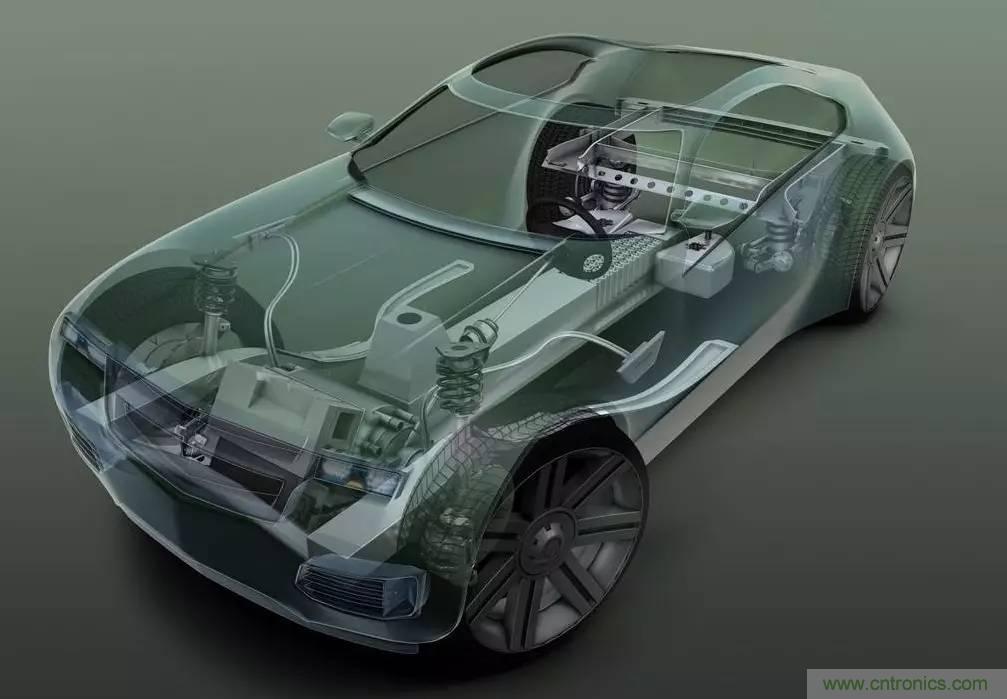
在工業(yè)測量和設(shè)計(jì)領(lǐng)域的應(yīng)用
慣性動(dòng)作捕捉為虛擬工業(yè)測量提供精準(zhǔn)的數(shù)據(jù),為設(shè)計(jì)用戶創(chuàng)造交互式、非侵入式的設(shè)計(jì)環(huán)境,可應(yīng)用在工作場所設(shè)計(jì)、汽車測試、航空航天研究等工業(yè)測量設(shè)計(jì)領(lǐng)域,例如在汽車設(shè)計(jì)領(lǐng)域,研究者可以用它來研究汽車駕駛室內(nèi)的操控性能、方向盤的距離、進(jìn)出車門的方便性,以及車身高度等方面;在機(jī)械設(shè)計(jì)領(lǐng)域,它可以用在操作臺的安裝、洗衣機(jī)高度的設(shè)計(jì)等方面;能夠有效地提高生產(chǎn)力并節(jié)約生產(chǎn)環(huán)境成本。而在生產(chǎn)線的操作上,它也可以為用戶提供專業(yè)的精確定位,從而解決生產(chǎn)和控制過程中的重復(fù)運(yùn)動(dòng)的問題。
隨著慣性動(dòng)作捕捉技術(shù)的不斷完善,它的精準(zhǔn)程度越來越高,應(yīng)用范圍也更加廣泛。除了以上介紹的七大方面外,慣性動(dòng)作捕捉還可以在舞臺特效、機(jī)器人控制、人機(jī)工程、化學(xué)化工在線仿真、汽車碰撞及震動(dòng)分析……等領(lǐng)域大有作為。

目前,動(dòng)作捕捉界市場還是以光學(xué)動(dòng)捕技術(shù)為主導(dǎo),能夠利用慣性傳感器開發(fā)人體全身運(yùn)動(dòng)捕捉系統(tǒng)的廠商屈指可數(shù),足見慣性動(dòng)捕系統(tǒng)有著不可估量的巨大潛力,而以中國諾亦騰公司為首的慣性動(dòng)捕技術(shù),以技術(shù)實(shí)力為武器,通過修煉內(nèi)功,填補(bǔ)了中國市場的空白,并逐步在市場上占領(lǐng)先機(jī)。它必將扛起動(dòng)作捕捉行業(yè)的大旗,全面扭轉(zhuǎn)國內(nèi)動(dòng)捕行業(yè)格局,成為與光學(xué)動(dòng)捕平分天下,甚至更具市場競爭力的重頭技術(shù)。
本文轉(zhuǎn)載自傳感器技術(shù)。
推薦閱讀:



