

【導(dǎo)讀】電動(dòng)汽車的電源管理在多個(gè)領(lǐng)域都有涉及,例如車輛行駛速度、電動(dòng)機(jī)、行駛阻力、蓄電池的工作狀況、發(fā)動(dòng)機(jī)等。電動(dòng)汽車的電源管理的關(guān)鍵在于利用CAN總線技術(shù)連接測控裝置。在蓄電池混合動(dòng)力系統(tǒng)和全電動(dòng)力系統(tǒng)中,電源管理系統(tǒng)的設(shè)計(jì)是車輛性能中的關(guān)鍵點(diǎn)。
基于CAN 總線的能源管控系統(tǒng)拓?fù)浣Y(jié)構(gòu)
電動(dòng)汽車底盤部分耗能與節(jié)能系統(tǒng)連接起來形成的基于CAN 總線的能源管控網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖1 所示,共包括制動(dòng)能量轉(zhuǎn)換裝置、動(dòng)力總成、電池管理、電機(jī)控制器、行駛阻力測試幾個(gè)下位關(guān)鍵監(jiān)測節(jié)點(diǎn)和一個(gè)由車載計(jì)算機(jī)系統(tǒng)構(gòu)成的上位主控節(jié)點(diǎn)。
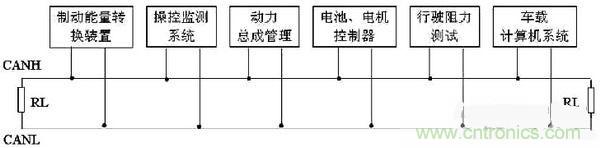
圖1:基于CAN 總線的能源管控網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
制動(dòng)能量轉(zhuǎn)換裝置與駕駛員的操控監(jiān)測系統(tǒng)、電池電機(jī)控制器共同工作。當(dāng)駕駛員踩踏制動(dòng)踏板時(shí),首先制動(dòng)電機(jī)靠近待制動(dòng)的旋轉(zhuǎn)器件,如傳動(dòng)軸,消耗車輛慣性能量,并轉(zhuǎn)換為電能,同時(shí)操控監(jiān)測系統(tǒng)監(jiān)測到制動(dòng)踏板動(dòng)作時(shí),對(duì)電池充電電路進(jìn)行調(diào)整,實(shí)現(xiàn)制動(dòng)電機(jī)傳遞過來的電能的存儲(chǔ)。
動(dòng)力總成系統(tǒng)主要用于實(shí)現(xiàn)發(fā)動(dòng)機(jī)工況的優(yōu)化運(yùn)行。在正常行使的情況下,發(fā)動(dòng)機(jī)的能量分為兩路,一路傳遞給車輛傳動(dòng)與推進(jìn)系統(tǒng),驅(qū)動(dòng)車輛正常行使,另一路則帶動(dòng)電機(jī)工作,向蓄電池供電。此時(shí),電機(jī)與電池構(gòu)成的輔助動(dòng)力系統(tǒng)相當(dāng)于一個(gè)能量調(diào)節(jié)裝置,通過電池電機(jī)控制器和行駛阻力測試裝置,根據(jù)外界路況的變化,實(shí)現(xiàn)發(fā)動(dòng)機(jī)兩路輸出能量的調(diào)整和分配。
通過CAN總線,車載計(jì)算機(jī)系統(tǒng)構(gòu)成的上位主控節(jié)點(diǎn)把整個(gè)能源管控網(wǎng)絡(luò)連接起來,通過專門的軟件系統(tǒng),進(jìn)行數(shù)據(jù)采集、數(shù)據(jù)分析和控制策略的輸出,實(shí)現(xiàn)外界行駛阻力與發(fā)動(dòng)機(jī)能量調(diào)整之間的優(yōu)化匹配,實(shí)現(xiàn)車輛內(nèi)部的能量轉(zhuǎn)換利用,實(shí)現(xiàn)電機(jī)、電池系統(tǒng)的節(jié)能、蓄能和補(bǔ)充能量的調(diào)節(jié)作用。
電源管理系統(tǒng)的通信需求與CAN 總線技術(shù)
電動(dòng)汽車的電源管理,需要隨時(shí)監(jiān)控發(fā)動(dòng)機(jī)、電動(dòng)機(jī)、蓄電池的工作狀況、車輛行駛速度、行駛阻力數(shù)據(jù)以及駕駛員的操作情況,并且能夠根據(jù)上述數(shù)據(jù)經(jīng)過智能化處理后自動(dòng)控制節(jié)能裝置或者電路工作,所以需要首先解決與能量消耗和能量轉(zhuǎn)換相關(guān)的部件運(yùn)行狀態(tài)傳感器的連接方式。
目前,汽車內(nèi)部測量與執(zhí)行部件之間的數(shù)據(jù)通信主要采用CAN 總線技術(shù),該總線技術(shù)最早由德國BOSCH 公司推出,主要用于解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換問題。利用CAN 總線開發(fā)的電動(dòng)汽車電源管理系統(tǒng),不僅通信速率高、準(zhǔn)確、可靠性高,而且易于與整車控制網(wǎng)絡(luò)相兼容,為傳感器信號(hào)、各個(gè)控制單元的計(jì)算信息和運(yùn)行狀態(tài)的共享以及隨車或離車故障診斷等提供了基礎(chǔ)平臺(tái),所以本課題中,采用CAN 總線作為電源管理的基本通信技術(shù)。
基于CAN 總線的各監(jiān)控節(jié)點(diǎn)結(jié)構(gòu)和通信流程
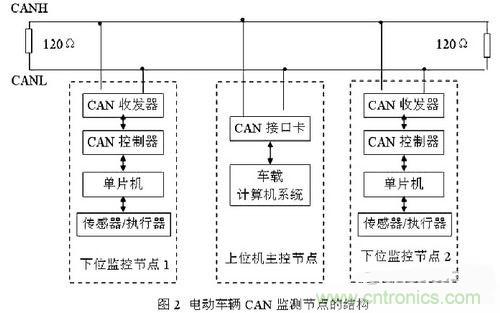
CAN 總線節(jié)點(diǎn)結(jié)構(gòu)一般分為兩類:一類采用CAN適配卡與PC機(jī)相連,實(shí)現(xiàn)上位機(jī)與CAN總線的通訊;另一類則是由單片機(jī)、CAN控制器及CAN驅(qū)動(dòng)器構(gòu)成,作為一類節(jié)點(diǎn)與CAN總線進(jìn)行數(shù)據(jù)傳輸,在本文設(shè)計(jì)的能源管控系統(tǒng)中,上位主控節(jié)點(diǎn)采用了第一類CAN總線節(jié)點(diǎn)結(jié)構(gòu),各個(gè)關(guān)鍵監(jiān)測/控制系統(tǒng)采用了第二類 CAN 總線節(jié)點(diǎn)結(jié)構(gòu)。各個(gè)節(jié)點(diǎn)的結(jié)構(gòu)和系統(tǒng)的連接方式如圖2 所示。在總線的兩端配置了兩個(gè)120Ω的電阻,其作用是總線匹配阻抗,可以增加總線傳輸?shù)姆€(wěn)定性和抗干擾能力,減少數(shù)據(jù)傳輸中的出錯(cuò)率。
[page]
對(duì)于各個(gè)下位監(jiān)控節(jié)點(diǎn)而言,通??刹捎?1 系列單片機(jī)作為該節(jié)點(diǎn)的監(jiān)測信號(hào)初級(jí)處理中心裝置,而用SJA1000 來做C A N 控制器,PCA82C250 則是一種常用的CAN 收發(fā)器和物理總線的接口,主要可以提供對(duì)總線的差動(dòng)發(fā)送能力和對(duì)CAN 控制器的差動(dòng)接受能力。采用上述三種元器件構(gòu)成的一個(gè)下位監(jiān)控節(jié)點(diǎn)的電路圖形如圖3 所示。
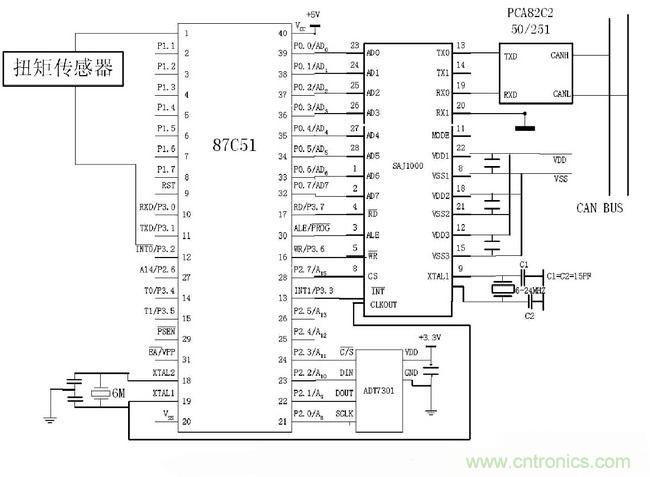
圖3:節(jié)點(diǎn)電路圖
CAN總線結(jié)構(gòu)
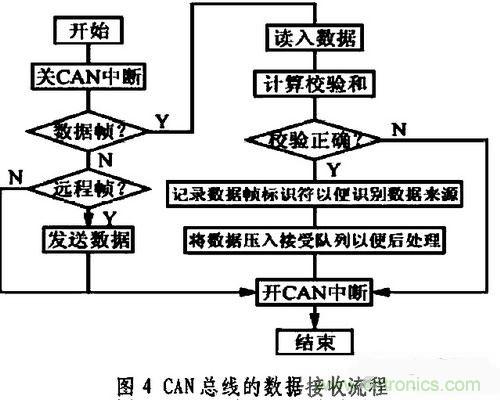
CAN 總線的三層結(jié)構(gòu)模型為:物理層、數(shù)據(jù)鏈路層和應(yīng)用層。其中物理層和數(shù)據(jù)鏈路層的功能由SJA1000 完成。SJA1000 在上電硬件復(fù)位之后,必須對(duì)其進(jìn)行軟件初始化之后才可以進(jìn)行數(shù)據(jù)通訊,其主要作用是實(shí)現(xiàn)對(duì)總線的速率、驗(yàn)收屏蔽碼、輸出引腳驅(qū)動(dòng)方式、總線模式及時(shí)鐘分頻進(jìn)行定義。整個(gè)能源管控系統(tǒng)通信過程中,各控制器按規(guī)定格式和周期發(fā)送數(shù)據(jù)(車速、蓄電池電壓、電流和行駛阻力和發(fā)動(dòng)機(jī)轉(zhuǎn)速等)到總線上,同時(shí)也要接收其它控制器的信息。總線上其它控制器根據(jù)需要各取所需的報(bào)文。對(duì)于接收數(shù)據(jù),系統(tǒng)采用中斷的方式實(shí)現(xiàn),一旦中斷發(fā)生,即將接收的數(shù)據(jù)自動(dòng)裝載到相應(yīng)的報(bào)文寄存器中。此時(shí)還可采用屏蔽濾波方式,利用屏蔽濾波寄存器對(duì)接收?qǐng)?bào)文的標(biāo)識(shí)符和預(yù)先在接收緩沖器初始化時(shí)設(shè)定的標(biāo)識(shí)符進(jìn)行有選擇地逐位比較,只有標(biāo)識(shí)符匹配的報(bào)文才能進(jìn)入接收緩沖器,那些不符合要求的報(bào)文將被屏蔽于接收緩沖器外, 從而減輕CPU 處理報(bào)文的負(fù)擔(dān)。上位機(jī)利用中斷方式接收相關(guān)數(shù)據(jù)的流程如圖4 所示。
電動(dòng)汽車能源管理的重要性
電動(dòng)汽車的電源管理,主要作用在于充分發(fā)揮燃料的燃燒效能,使發(fā)動(dòng)機(jī)在最佳工況點(diǎn)附近工作,并通過電動(dòng)機(jī)和蓄電池的能量儲(chǔ)備與輸出,及時(shí)調(diào)節(jié)車輛運(yùn)行工況和外界路面條件之間的匹配關(guān)系。經(jīng)過十多年的發(fā)展,電動(dòng)汽車的動(dòng)力系統(tǒng)設(shè)計(jì)方面,目前最有實(shí)用性價(jià)值并已有商業(yè)化運(yùn)轉(zhuǎn)的模式,只有混合動(dòng)力汽車?;旌蟿?dòng)力系統(tǒng)總成已從原來發(fā)動(dòng)機(jī)與電機(jī)離散結(jié)構(gòu)向發(fā)動(dòng)機(jī)電機(jī)和變速箱一體化結(jié)構(gòu)發(fā)展,即集成化混合動(dòng)力總成系統(tǒng)。所以,這里只考慮混合動(dòng)力系統(tǒng)的電源管理情況?;旌蟿?dòng)力系統(tǒng)的電源管理,從功能上而言,需要實(shí)現(xiàn)如下兩個(gè)目標(biāo):
(1)保證發(fā)動(dòng)機(jī)的最佳工況,避免出現(xiàn)發(fā)動(dòng)機(jī)的低效工作。通??蓪l(fā)動(dòng)機(jī)調(diào)整在最佳工況點(diǎn)附近穩(wěn)定運(yùn)轉(zhuǎn),通過調(diào)整電池和電動(dòng)機(jī)的輸出來適應(yīng)各種外界路況變化。例如,當(dāng)車輛處于低速、滑行、怠速的工況時(shí),則由電池組驅(qū)動(dòng)電動(dòng)機(jī),當(dāng)車輛處啟動(dòng)、加速、爬坡工況時(shí),發(fā)動(dòng)機(jī)- 電動(dòng)機(jī)組和電池組共同向電動(dòng)機(jī)提供電能。這樣,由于發(fā)動(dòng)機(jī)避免了怠速和低速運(yùn)轉(zhuǎn)從而提高了發(fā)動(dòng)機(jī)的效率,不僅減少了廢氣排放,而且節(jié)約了電源。
(2 )充分利用車輛的慣性能量。當(dāng)車輛減速、制動(dòng)或者下坡路行駛時(shí),則由車輪的慣性力驅(qū)動(dòng)電動(dòng)機(jī)。這時(shí)電動(dòng)機(jī)變成了發(fā)電機(jī),可以反向蓄電池充電,節(jié)約了燃料。


