
【導(dǎo)讀】在測(cè)試測(cè)量和醫(yī)療行業(yè)中,許多應(yīng)用采集的原始信號(hào)都是光信號(hào),例如LiDAR,OTDR,PCR等。在采集的過(guò)程中這類應(yīng)用會(huì)不可避免的進(jìn)行光電轉(zhuǎn)換,首先通過(guò)光電二極管把光信號(hào)轉(zhuǎn)化成電流信號(hào),然后在通過(guò)跨阻放大電路把電流信號(hào)轉(zhuǎn)成電壓信號(hào),之后再進(jìn)行信號(hào)調(diào)理,最終輸入ADC中。
其中跨阻放大電路的設(shè)計(jì)尤為關(guān)鍵,主要包括兩方面,一方面是穩(wěn)定性設(shè)計(jì),一方面是噪聲控制。接下來(lái)我們主要介紹如何借助TINA-TI來(lái)進(jìn)行跨阻放大電路的穩(wěn)定性設(shè)計(jì)。
一、 跨阻放大電路介紹
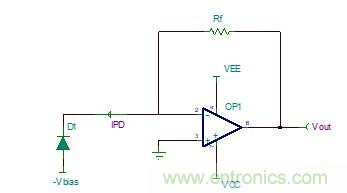
圖 1 理想的跨阻放大電路
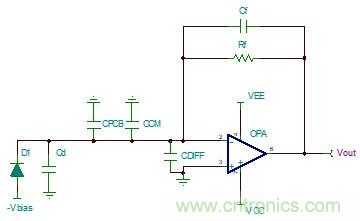
圖 2 實(shí)際的跨阻放大電路
如圖1所示,是理想的跨阻放大器電路,其工作原理如公式(1)所示。
但是在實(shí)際應(yīng)用中,光電二極管會(huì)有一個(gè)從1pF至上百pF之間的寄生電容Cd。運(yùn)算放大器的輸入共模Ccm和輸入差模電容Cdiff也需要考慮。除此之外,還有PCB的寄生電容Cpcb。
這時(shí)需要在反饋回路上加入反饋電容Cf,來(lái)對(duì)環(huán)路進(jìn)行補(bǔ)償。如圖2所示。
最終可以等效為:
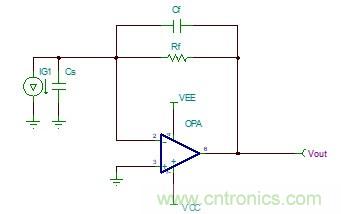
圖 3 等效電路圖
二、設(shè)計(jì)及仿真過(guò)程
仿真工具:TINA-TI。
在開(kāi)始設(shè)計(jì)之前,我們要清楚Rf和Cs應(yīng)該是已知的。
一般來(lái)講,設(shè)計(jì)思路無(wú)外乎以下兩種。
1)需要根據(jù)我們對(duì)跨阻放大電路的目標(biāo)閉環(huán)帶寬f-3dB去選出合適的GBP的運(yùn)放和反饋電容Cf。
2)根據(jù)所選運(yùn)算放大器的GBP,計(jì)算跨阻放大電路可以實(shí)現(xiàn)的閉環(huán)帶寬f-3dB和反饋電容Cf。
為了便于理解,以一個(gè)開(kāi)環(huán)增益為120dB,主極點(diǎn)為1kHZ運(yùn)放為例,先從理想情況出發(fā),逐步貼近實(shí)際情況。
1.理想的跨阻放大電路的穩(wěn)定性分析
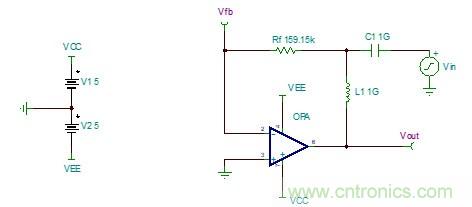
圖 4 理想的跨阻放大電路
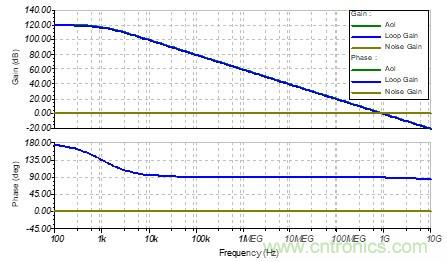
圖 5 理想跨阻放大電路的伯德圖
從伯德圖,我們可以看出來(lái),該運(yùn)放的開(kāi)環(huán)增益曲線Aol在1KHz處有一個(gè)主極點(diǎn),使得Loop Gain以-20dB/dec速度下降,并在1GHz處穿越0dB,同時(shí)該主極點(diǎn)使Loop Gain的相位裕度等于90°,滿足運(yùn)放電路的穩(wěn)定性判據(jù),所以該系統(tǒng)處于穩(wěn)定狀態(tài)。
關(guān)于TINA-TI仿真運(yùn)放穩(wěn)定性的詳細(xì)步驟,大家請(qǐng)參考《TI Precision Labs - Op Amps: Stability》
在對(duì)理想跨阻放大器的穩(wěn)定性進(jìn)行分析之后,讓我們進(jìn)一步考慮實(shí)際情況,把PD的結(jié)電容和運(yùn)放的輸入電容考慮進(jìn)來(lái)。
2. Cs對(duì)跨阻放大電路的穩(wěn)定性影響
我們假設(shè)全部的輸入電容Cs=10pF,目標(biāo)的跨阻增益是Rf=159.15K?。
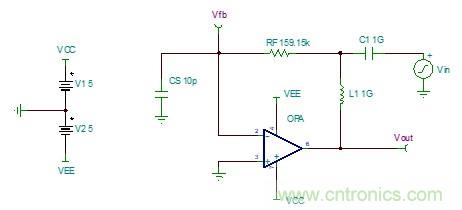
圖 6 考慮Cs的跨阻放大電路

圖 7 考慮Cs的跨阻放大電路的伯德圖
首先觀察一下幅頻曲線:
噪聲增益1⁄β即閉環(huán)增益隨頻率的變化。
在低頻部分,10pF電容的阻抗非常大,可以認(rèn)為是開(kāi)路,運(yùn)放會(huì)跟之前一樣作為一個(gè)單位增益的同相放大電路,所以它的幅值為0dB.
隨著頻率的上升,輸入電容Cs的阻抗開(kāi)始下降,在100KHz處,Rf和Cs制造了一個(gè)零點(diǎn)1⁄(2π?159.15k??10pF)=100KHz。噪聲增益1⁄β將會(huì)以20dB/dec的速度上升。
從環(huán)路增益Loop Gain的角度出發(fā),等價(jià)于開(kāi)環(huán)增益Aol和噪聲增益1⁄β相減,將會(huì)在環(huán)路增益Loop Gain中出現(xiàn)兩個(gè)極點(diǎn),等于0dB的點(diǎn)就是Loop Gain的穿越頻率點(diǎn)。最終Loop Gain會(huì)以-40dB/dec的斜率穿越0dB,根據(jù)自動(dòng)控制理論,那該電路將會(huì)處于不穩(wěn)定的狀態(tài)。
從相頻曲線上看:
在環(huán)路增益Loop Gain 曲線上,1KHz處的主極點(diǎn)會(huì)帶來(lái)〖90〗^°的相移,從100Hz處開(kāi)始,在10KHz處完成相移。因?yàn)樵?00KHz處還有一個(gè)極點(diǎn),相位會(huì)繼續(xù)下降,從10KHz開(kāi)始,并在1MHz處完成相移,所以在穿越頻率點(diǎn)10MHz的相位裕度將會(huì)是0^°,根據(jù)自動(dòng)控制理論,該電路將會(huì)處于不穩(wěn)定的狀態(tài)。
為了避免這種不穩(wěn)定的狀態(tài),需要在反饋回路中加入一個(gè)反饋電容,所以接下來(lái)看一下引入反饋電容后,環(huán)路的穩(wěn)定性將會(huì)發(fā)生什么樣的變化。
3. Cf對(duì)跨阻放大器電路的穩(wěn)定性影響
先假設(shè)反饋回路上并聯(lián)了一個(gè)141fF的電容,后續(xù)會(huì)介紹如何計(jì)算反饋電容的容值。
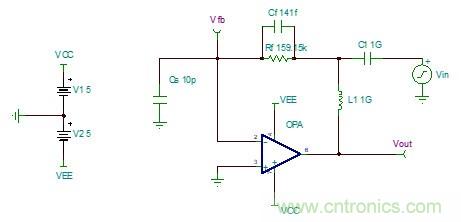
圖 8 加入Cf后的跨阻放大電路
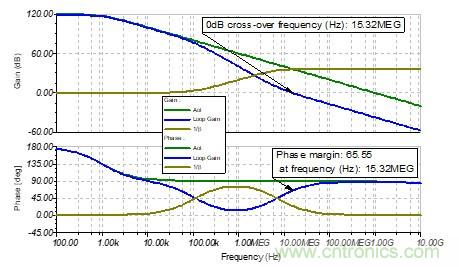
圖 9 加入Cf后跨阻放大電路的伯德圖
首先觀察一下幅頻曲線:
噪聲增益1⁄β在低頻部分,因?yàn)榉答侂娙軨f比輸入電容Cs小很多,它不會(huì)影響由Rf和Cs產(chǎn)生的零點(diǎn)的位置。在高頻部分,因?yàn)榉答侂娙軨f和反饋電阻Rf是并聯(lián)關(guān)系,所以在高頻部分反饋電阻Rf不再影響噪聲增益,最終的噪聲增益1⁄β由Cf和Cs決定,所以噪聲增益1⁄β的幅度將不再變化。也就是說(shuō),在噪聲增益的幅頻曲線中引入了一個(gè)由Rf和Cf產(chǎn)生的極點(diǎn),頻率是1⁄(2π?159.15k??141) fF=7.09MHz。
對(duì)于環(huán)路增益Loop Gain而言,R_f和C_f在Loop Gain在7.09MHz處引入了一個(gè)零點(diǎn),所以反饋電容Cf的作用是與Rf構(gòu)成零點(diǎn),恢復(fù)環(huán)路增益Loop Gain曲線中的相位裕度。如圖9所示,環(huán)路增益Loop Gain和噪聲增益1⁄β交叉發(fā)生在15.32MHz,由于該零點(diǎn)的存在,從該零點(diǎn)頻率的十分之一處700kHz開(kāi)始,以45°/dec的速度增加。所以在環(huán)路增益的穿越頻率15.32MHz處,環(huán)路增益Loop Gain恢復(fù)了足夠的相位,從而獲得了約65°的相位裕量。
將反饋電容Cf設(shè)置為遠(yuǎn)小于此141 fF的值將使Loop Gain中Rf和Cf形成的零點(diǎn)頻率提高。例如當(dāng)Cf=14.1fF時(shí),從相頻曲線上看,相位裕度低于理想值。
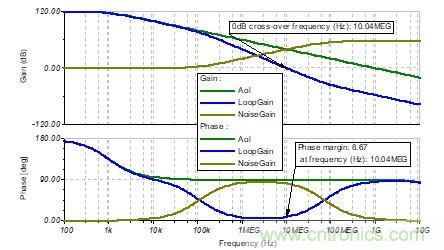
圖 10 Cf=14.1fF 的伯德圖
如果設(shè)置反饋電容Cf等于Cs,在噪聲增益中,Cf和Rf形成的極點(diǎn)頻率會(huì)接近于Cs和Rf形成的零點(diǎn)頻率,這會(huì)使相位裕度接近于90°,如圖11所示,最終導(dǎo)致系統(tǒng)的響應(yīng)速度變慢。這里大家是否會(huì)有疑問(wèn),既然已經(jīng)設(shè)置反饋電容Cf等于Cs了,那么為什么Cf和Rf形成的極點(diǎn)頻率與Cs和Rf形成的零點(diǎn)頻率不相等呢?
這是因?yàn)椋肼曉鲆嬷械倪@個(gè)零點(diǎn),是由Cs,Cf和Rf共同形成的,只不過(guò)當(dāng)Cf遠(yuǎn)小于Cs時(shí),我們可以把Cf忽略掉。
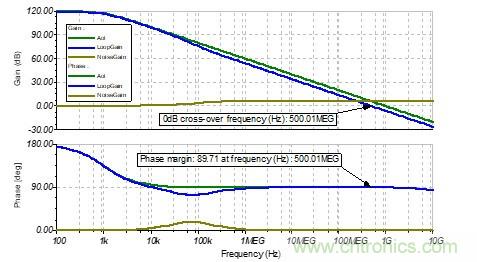
圖 11 Cf=Cs時(shí)的伯德圖
當(dāng)設(shè)置Cf=70fF,141fF,280fF時(shí),伯德圖如下:
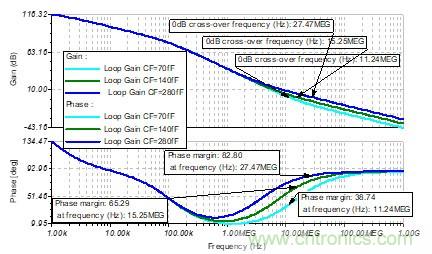
圖 12 Cf=70fF,141fF,280fF的伯德圖
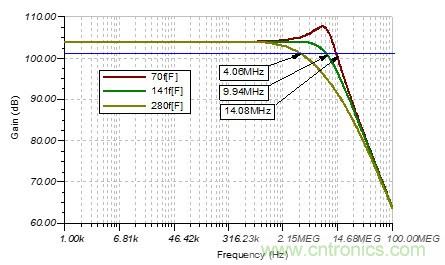
圖 13 Cf=70fF,141fF,280fF的閉環(huán)傳函的幅頻曲線
可以看到,隨著反饋電容Cf的增加,Loop Gain的穿越頻率越來(lái)越高,相位裕度越來(lái)越高,閉環(huán)帶寬越來(lái)越小。從閉環(huán)傳遞函數(shù)的角度上分析,反饋電容越大,Q越小,阻尼系數(shù)越大。與欠阻尼況和過(guò)阻尼相比,在臨界阻尼情況下(Q=0.707),系統(tǒng)從受擾動(dòng)以后,趨近平衡所需的時(shí)間最短。通過(guò)改變反饋電容的大小,可以改變相位裕度來(lái)控制脈沖響應(yīng)或者改變閉環(huán)增益。
4. 設(shè)計(jì)流程總結(jié)
1)確定Cs,反饋電阻Rf,閉環(huán)帶寬f-3dB。
例如,Cs=10fF,Rf=159.15 k?,f-3dB=10MHz
2)如果想得到巴特沃斯響應(yīng)Q=0.707,根據(jù)公式(3),確定所需要的最小的GBP,根據(jù)結(jié)算結(jié)果,選擇帶寬合適的運(yùn)放。

上面的公式是從何而來(lái)呢?可以參考一下《Transimpedance Considerations for High-Speed Amplifiers》,TIA電路的閉環(huán)傳遞函數(shù)是一個(gè)典型的二階振蕩環(huán)節(jié),在獲得巴特沃斯響應(yīng)時(shí),品質(zhì)因數(shù)Q=0.707時(shí),諧振頻率fo=f-3dB。當(dāng)根據(jù)TIA電路的閉環(huán)傳遞函數(shù)把fo的表達(dá)式寫(xiě)出來(lái)的時(shí)候發(fā)現(xiàn),該頻率點(diǎn)對(duì)應(yīng)的是開(kāi)環(huán)增益曲線和噪聲增益曲線沿第一個(gè)零點(diǎn)過(guò)后延長(zhǎng)線的交點(diǎn)。
需要注意的是,如果選擇的運(yùn)放的GBP比計(jì)算值大,那么在電路中計(jì)算時(shí)要按實(shí)際選擇運(yùn)放的GBP計(jì)算實(shí)際的閉環(huán)帶寬。代入Cs=10fF,Rf=159.15 k?,f-3dB=10MHz,得:
3)確定Cf。
同樣的,參考一下《Transimpedance Considerations for High-Speed Amplifiers》,噪聲增益曲線中反饋電阻R_f和反饋電容Cf形成的極點(diǎn)頻率除以諧振頻率fo等于Q,那么根據(jù)Q和f_o就可以求出Cf,而當(dāng)Q=0.707時(shí),fo=f-3dB:
TI有一個(gè)Excel計(jì)算工具,可以幫助您完成設(shè)計(jì),見(jiàn)《What you need to know about transimpedance amplifiers – part 2》
5. Decompensated amplifier在TIA電路中的應(yīng)用
Decompensated amplifier是一種通過(guò)犧牲穩(wěn)定性來(lái)提高性能的,單位增益下不穩(wěn)定的運(yùn)放。 與單位增益穩(wěn)定運(yùn)放相比,去補(bǔ)償?shù)姆糯笃髟谑褂酶俚碾娏鞯耐瑫r(shí),可以獲得更高的增益帶寬乘積,更低的噪聲,更高的壓擺率。

對(duì)于如圖1 理想的跨阻放大器電路而言,只有反饋電阻的存在,這種情況下,噪聲增益為1,那么對(duì)于decompensated amplifier而言,因?yàn)閱挝辉鲆娌环€(wěn)定的原因,去補(bǔ)償放大器是不適合這種情況的。
但是,對(duì)于實(shí)際的跨阻放大器電路而言,由于Cs和Cf的存在,將Noise Gain 將會(huì)穩(wěn)定在(1+Cs/Cf),這樣
1)確保了decompensated amplifier能夠工作在穩(wěn)定的狀態(tài)。
2)因?yàn)閐ecompensated amplifier的開(kāi)環(huán)增益曲線相比單位增益放大器的開(kāi)環(huán)增益曲線,向上和向右拓展,因此避免了使用單位增益放大器的Loop Gain 以-40dB/dec速度下降的可能,同時(shí)提高了該放大電路的閉環(huán)帶寬。
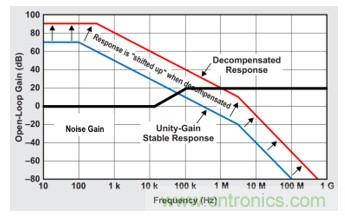
圖 14 Decompensated amplifier與單位增益放大器開(kāi)環(huán)增益的區(qū)別
所以Decompensated amplifier是天然適合跨阻放大電路的應(yīng)用。有關(guān)Decompensated amplifier的詳細(xì)介紹請(qǐng)參考《Easily improve the performance of analog circuits with decompensated amplifiers》
希望這些內(nèi)容能夠幫助您利用TI-TINA更快、更好地完成跨阻放大電路的設(shè)計(jì)。
推薦閱讀:



