

【導(dǎo)讀】鎖相的意義是相位同步的自動(dòng)控制,能夠完成兩個(gè)電信號相位同步的自動(dòng)控制閉環(huán)系統(tǒng)叫做鎖相環(huán),簡稱PLL。它廣泛應(yīng)用于廣播通信、頻率合成、自動(dòng)控制及時(shí)鐘同步等技術(shù)領(lǐng)域。
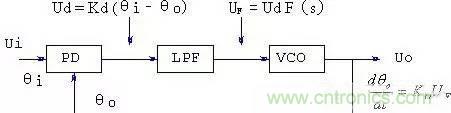
一個(gè)典型的鎖相環(huán)(PLL)系統(tǒng),是由鑒相器(PD),壓控蕩器(VCO)和低通濾波器(LPF)三個(gè)基本電路組成,如圖1,
一、鑒相器(PD)構(gòu)成鑒相器的電路形式很多,這里僅介紹實(shí)驗(yàn)中用到的兩種鑒相器。1.異或門鑒相器 異或門的邏輯真值表示于表1,圖2是邏輯符號圖。
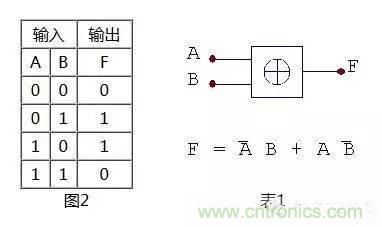
從表1可知,如果輸入端A和B分別送入占空比為50%的信號波形, 則當(dāng)兩者存在相位差Dθ時(shí),輸出端F的波形的占空比與Δθ有關(guān),見圖3。將F輸出波形通過積分器平滑,則積分器輸出波形的平均值,它同樣與Δθ有關(guān),這樣,我們就可以利用異或門來進(jìn)行相位到電壓的轉(zhuǎn)換,構(gòu)成相位檢出電路。于是經(jīng)積分器積分后的平均值(直流分量)為:U = Vdd * Δ θ/π (1)
不同的Δθ,有不同的直流分量Vd。Δθ與V的關(guān)系可用圖4來描述。從圖中可知,兩者呈簡單線形關(guān)系:Ud = Kd *Δθ (2)Kd 為鑒相靈敏度
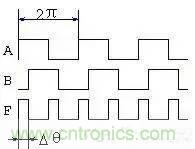
圖3
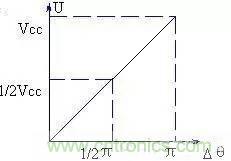
圖4
2.邊沿觸發(fā)鑒相器 前已述及,異或門相位比較器在使用時(shí)要求兩個(gè)作比較的信號必須是占空比為50%的波形,這就給應(yīng)用帶來了一些不便。而邊沿觸發(fā)鑒相器是通過比較兩輸入信號的上跳邊沿(或下跳邊沿)來對信號進(jìn)行鑒相,對輸入信號的占空比不作要求。
二、壓控振蕩器(VCO)壓控振蕩器是振蕩頻率ω0受控制電壓UF(t)控制的振蕩器,即是一種電壓——頻率變換器。VCO的特性可以用瞬時(shí)頻率ω0(t)與控制電壓UF(t)之間的關(guān)系曲線來表示。未加控制電壓時(shí)(但不能認(rèn)為就是控制直流電壓為0,因控制端電壓應(yīng)是直流電壓和控制電壓的疊加),VCO的振蕩頻率,稱為自由振蕩頻率ωom,或中心頻率,在VCO線性控制范圍內(nèi),其瞬時(shí)角頻率可表示為:ωo(t)= ωom + K0 UF(t)式中,K0——VCO控制特性曲線的斜率,常稱為VCO的控制靈敏度,或稱壓控靈敏度。
三、環(huán)路濾波器
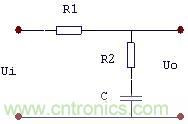
這里僅討論無源比例積分濾波器如圖5。其傳遞函數(shù)為:
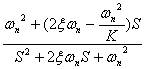
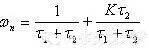
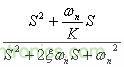
四、鎖相環(huán)的相位模型及傳輸函數(shù)

五、鎖相環(huán)的同步與捕捉
鎖相環(huán)的輸出頻率(或VCO的頻率)ωo能跟蹤輸入頻率ωi的工作狀態(tài),稱為同步狀態(tài),在同步狀態(tài)下,始終有ωo = ωi。在鎖相環(huán)保持同步的條件下,輸入頻率ωi的最大變化范圍,稱為同步帶寬,用DωH 表示。超出此范圍,環(huán)路則失鎖。失鎖時(shí),ωo≠ωi,如果從兩個(gè)方向設(shè)法改變ωi,使ωi向ωo靠攏,進(jìn)而使Δωo =(ωi-ωo)↓,當(dāng)Δωo小到某一數(shù)值時(shí),環(huán)路則從失鎖進(jìn)入鎖定狀態(tài)。這個(gè)使PLL經(jīng)過頻率牽引最終導(dǎo)致入鎖的頻率范圍稱為捕捉帶Δωp。同步帶ΔωH,捕捉帶Δωp 和VCO 中心頻率ωo的 關(guān)系如圖7。






