
【導(dǎo)讀】隨著人工智能和傳感器技術(shù)的發(fā)展,機器人已從工廠的結(jié)構(gòu)化環(huán)境進入人們的日常生活環(huán)境,機器人不僅能自主完成工作,還能與人共同協(xié)作完成任務(wù)或在人的指導(dǎo)下完成任務(wù)。家庭服務(wù)機器人是智能家居系統(tǒng)的一個重要組成部分,在生活中的作用越來越重要。當(dāng)前,大部分的家庭服務(wù)機器人不具備行走功能或只具有簡單的避障能力,機器人的研究很多依賴于仿真實現(xiàn),但是現(xiàn)實情況和仿真結(jié)果可能大相徑庭。也有一些研究將問題復(fù)雜化,反而走了更多的彎路。
針對當(dāng)前家庭服務(wù)機器人的不足和現(xiàn)代智能服務(wù)機器人的要求,本文提出一種基于STM32的家庭服務(wù)機器人系統(tǒng)的設(shè)計方案。該方案模擬智能家居環(huán)境,簡化了定位方式,有效地利用了ZigBee技術(shù)低成本、低功耗的特點,設(shè)計出一個合適大小的輪式機器人進行試驗,試驗結(jié)果表明機器人能夠?qū)崿F(xiàn)預(yù)期目標(biāo)并體現(xiàn)出較強的自主決策能力。
1 系統(tǒng)整體設(shè)計方案
整個家庭服務(wù)機器人系統(tǒng)主要由四部分組成,包括鋪滿RFID智慧地板的模擬智能家居環(huán)境、移動的輪式機器人、XBee協(xié)調(diào)器以及上位機。
智能家居環(huán)境設(shè)計長為3.25米,寬為2米,鋪滿RFID智能地板,分隔成廚房和客廳兩個房間,中間的房門寬0.3米。廚房有水槽、擱板、智能冰箱等電器,客廳有餐桌、餐椅等。RFID智能地板的排列信息給機器人提供準(zhǔn)確定位。輪式機器人負責(zé)往返廚房與客廳之間給服務(wù)對象運送物品,是整個系統(tǒng)的核心部分。XBee協(xié)調(diào)器是基于ZigBee技術(shù)的無線傳輸模塊,負責(zé)數(shù)據(jù)快速穩(wěn)定地傳遞。上位機主要負責(zé)數(shù)據(jù)的接收、處理和控制指令的下達等。
2 系統(tǒng)工作原理和流程
系統(tǒng)的主要工作流程是:上位機輸入任務(wù)命令,該命令通過XBee協(xié)調(diào)器發(fā)送給輪式機器人。機器人收到任務(wù)命令后從休眠模式啟動,讀取智能地板RFID定位信息,將該實時位置信息上傳到上位機,以顯示機器人運動軌跡。機器人通過傳感器模塊檢測自身姿態(tài)和周圍障礙物情況,自主決策移動至目標(biāo)位置抓取物品,運送到最終目標(biāo)位置給服務(wù)對象使用。其中,輪式機器人是整個系統(tǒng)設(shè)計的重點。
2.1 XBee協(xié)調(diào)器工作流程
XBee協(xié)調(diào)器是最先啟動的XBee網(wǎng)絡(luò)節(jié)點,主要完成XBee網(wǎng)絡(luò)的組網(wǎng)功能和數(shù)據(jù)的收發(fā)功能,其中組網(wǎng)功能包括XBee網(wǎng)絡(luò)的建立和子節(jié)點的入網(wǎng)。
首先,在XBee協(xié)調(diào)器上電復(fù)位后對包括硬件和軟件的各個模塊進行初始化。然后,開始掃描信道、進行能量檢測、選擇信道以及選擇合適的PAN ID。成功之后就廣播網(wǎng)絡(luò)ID、信道,XBee網(wǎng)絡(luò)就建立了。之后,XBee協(xié)調(diào)器進入監(jiān)聽狀態(tài),等待子節(jié)點發(fā)送入網(wǎng)請求信號,收到入網(wǎng)請求后協(xié)調(diào)器允許子節(jié)點入網(wǎng)并分配網(wǎng)絡(luò)短地址給子節(jié)點,這就實現(xiàn)了節(jié)點的入網(wǎng)功能。最后,XBee協(xié)調(diào)器將上位機數(shù)據(jù)發(fā)送給子節(jié)點射頻模塊,啟動輪式機器人,在收到來自子節(jié)點的數(shù)據(jù)請求后,將接收數(shù)據(jù)并通過串口線傳輸給上位機,這就是數(shù)據(jù)的收發(fā)功能。
2.2 輪式機器人工作流程
輪式機器人是任務(wù)的執(zhí)行設(shè)備,往返于廚房和客廳兩個房間之間,準(zhǔn)確和高效地執(zhí)行用戶對象發(fā)送的各種命令任務(wù),并發(fā)送機器人坐標(biāo)數(shù)據(jù)給XBee協(xié)調(diào)器進行以下工作。
首先,輪式機器人上的XBee模塊需要初始化和發(fā)送入網(wǎng)請求,實現(xiàn)節(jié)點入網(wǎng)。然后,XBee模塊接收XBee協(xié)調(diào)器傳輸?shù)娜蝿?wù)命令數(shù)據(jù),主板對各傳感器模塊初始化。RFID讀卡器讀取智能地板坐標(biāo)數(shù)據(jù),發(fā)送給XBee協(xié)調(diào)器。電子羅盤獲取機器人當(dāng)前的姿態(tài)信息。紅外傳感器檢測機器人所處環(huán)境的障礙物距離,主板控制啟動由左右兩個連續(xù)旋轉(zhuǎn)舵機組成的移動輪。機器人通過自主決策規(guī)劃路徑,移動至目標(biāo)位置,啟動機械臂抓取物品,其中機械臂由多個角度舵機組成。在機械臂保持抓取物品的狀態(tài)下,再次規(guī)劃路徑移動至最終地點,機械臂準(zhǔn)確將物品放在目標(biāo)位置。完成任務(wù)后機器人回到起始位置,進入休眠模式。
3 關(guān)鍵環(huán)節(jié)設(shè)計
3.1 機器人硬件結(jié)構(gòu)設(shè)計
輪式機器人采用模塊化的設(shè)計原則,使機器人的設(shè)計為模塊化方式,并采用分層控制,有利于綜合性能的發(fā)揮。將機器人系統(tǒng)分為五個部分:主板、傳感器模塊、無線射頻模塊、舵機模塊和電源模塊。輪式機器人的結(jié)構(gòu)框圖如圖1所示。
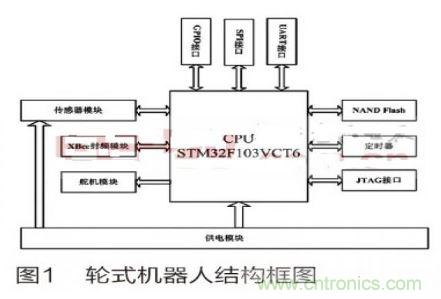
3.1.1 主板
主板是針對該輪式機器人設(shè)計,采用ARM Cortex-M3內(nèi)核的STM32F103VCT6處理器,主板資源包括SDRAM、NAND Flash,UART接口、GPIO接口、SPI接口和JTAG接口。輔助的資源有USB接口、定時器等。
主板的設(shè)計專門為射頻模塊、傳感器模塊和機械臂模塊提供了接口,簡化了電路結(jié)構(gòu),使控制器集成度更高,運行更加穩(wěn)定和高效,從而節(jié)約硬件成本。
3.1.2 傳感器模塊
傳感器模塊由傳感器和相應(yīng)的信號調(diào)理電路組成。輪式機器人使用的傳感器包括紅外傳感器、電子羅盤和RFID讀卡器。根據(jù)輪式機器人移動過程中檢測障礙物距離的精度要求,紅外傳感器采用的型號為Sharp GP2D12,分別安裝在機器人前方、左前方、右前方、左側(cè)和右側(cè)五個位置。電子羅盤采用GY-80九軸模塊中的HMC5883L三軸電子羅盤,可以在復(fù)雜環(huán)境下測得準(zhǔn)確方位值,抗磁電干擾能力較強。RFID讀卡器采用Parallax公司的低頻段28140讀卡器,可讀取125kHz標(biāo)簽。
3.1.3 射頻模塊
射頻模塊是設(shè)備之間通信的主要模塊,負責(zé)整個網(wǎng)絡(luò)的數(shù)據(jù)傳輸工作。射頻模塊采用基于ZigBee技術(shù)的XBee無線傳輸模塊,該模塊覆蓋面積大且易于配置,是機器人通訊組網(wǎng)的不錯選擇。
XBee協(xié)調(diào)器由XBee無線模塊和XBee USB適配板組成。XBee USB適配板是專門為XBee無線模塊配套設(shè)計,通過使用該模塊,可以在PC機使用配套的X-CTU軟件對XBee無線模塊進行配置及串口通訊監(jiān)控。XBee協(xié)調(diào)器通過USB線與上位機連接通信。
3.1.4 舵機模塊
舵機模塊分為機械臂舵機和移動輪舵機,機械臂由角度舵機和金屬桿件組成。五個角度舵機構(gòu)成五自由度機械臂,尺寸大小與搭建智能家居環(huán)境匹配,為保證機械臂動作精度,采用HS-322HD角度舵機。移動輪舵機使用Parallax連續(xù)旋轉(zhuǎn)舵機。
3.1.5 電源模塊
根據(jù)各個組成部分工作的場合和特點的不同,采用不同的供電模式,輪式機器人采用電池供電的模式,而XBee協(xié)調(diào)器則要一直保持工作狀態(tài),所以采用上位機USB供電的模式。電源模塊與主板相連,而主板留有接口給傳感器模塊、射頻模塊和舵機模塊,通過接口給傳感器模塊、射頻模塊和舵機模塊進行供電。由于RFID讀卡器對電流要求較高,因此主板和RFID讀卡器分開使用雙電源供電。
3.2 機器人軟件設(shè)計
3.2.1驅(qū)動控制設(shè)計
驅(qū)動控制設(shè)計包括各個模塊的初始化、模塊之間的通信和上位機軟件設(shè)計。該文采用與STM32F103VCT6配套的MDK-ARM作為開發(fā)環(huán)境,完成各個模塊初始化和通信,上位機軟件采用VC++開發(fā)。具體的各個模塊軟件實現(xiàn)的功能及工作流程在系統(tǒng)的工作原理和流程中已經(jīng)介紹,這里不再敘述。

3.2.2 路徑規(guī)劃
路徑規(guī)劃主要可分為全局路徑規(guī)劃和局部路徑規(guī)劃,前者是指在環(huán)境信息完全已知的情況下,機器人規(guī)劃一條從初始位置到目標(biāo)位置的無碰撞最優(yōu)路徑;后者由于環(huán)境信息是未知的,需考慮局部的特定情況來進行路徑調(diào)整。
機器人移動過程中利用電子羅盤進行姿態(tài)調(diào)整,即調(diào)整前進方向,努力尋找一條最快捷的路徑到達目標(biāo)位置。機器人姿態(tài)調(diào)整主要取決于當(dāng)前位置和前一位置與目標(biāo)位置的距離,包括橫向距離和縱向距離。若當(dāng)前位置與目標(biāo)位置的橫向距離和縱向距離分別小于或者等于前一位置與目標(biāo)位置的橫向距離和縱向距離,表明機器人與目標(biāo)位置的距離在逐漸縮小,機器人在朝目標(biāo)位置前進,否則就說明機器人沒有按預(yù)期的軌跡前進,需要再次進行姿態(tài)調(diào)整。姿態(tài)調(diào)整示意圖如圖2所示。
局部路徑規(guī)劃包括避障處理、振蕩位置分析、房門位置搜索和過房門策略分析。在機器人移動過程中,需要不斷探測周圍環(huán)境,從而更好地決定下一步動作。五個紅外傳感器數(shù)據(jù)使機器人時刻掌握周圍環(huán)境,避障處理要求機器人合理避開障礙物,向目標(biāo)位置移動。
振蕩位置指的是機器人不能順利通過某一位置,而在這一點附近反復(fù)來回走動。如果起始位置和目標(biāo)位置分別在兩個房間,在全局路徑規(guī)劃思想的指導(dǎo)下,機器人會在兩間房的公用墻邊不斷徘徊。振蕩位置分析示意圖如圖3所示。
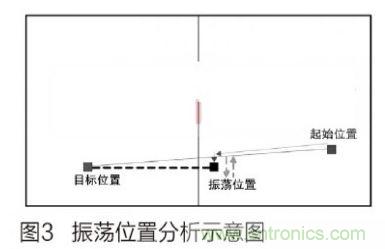
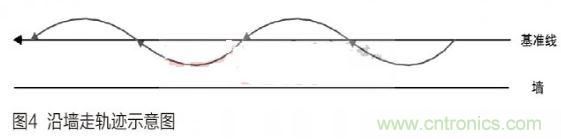
當(dāng)機器人到達振蕩位置時,需要調(diào)整路徑規(guī)劃策略,此時放棄全局路徑規(guī)劃策略,選擇直接以公用墻為基準(zhǔn)墻搜索房門。沿墻走算法的基本規(guī)則是:當(dāng)機器人不斷靠近墻面時需要調(diào)整兩輪速差使機器人朝偏離墻面的方向前進;當(dāng)機器人不斷遠離墻面時,則需要調(diào)整兩輪速差,使機器人朝靠近墻面的方向前進。綜合調(diào)整的結(jié)果是機器人的前進軌跡是以基準(zhǔn)線為軸的類正弦曲線,沿墻走軌跡如圖4所示。
過房門是機器人完成任務(wù)必不可少的一個環(huán)節(jié),怎樣確保機器人順利穿過房門是任務(wù)成功的關(guān)鍵。機器人準(zhǔn)備過房門時并不是正對房門,可能向左側(cè)或者右側(cè)不同程度的傾斜。根據(jù)傾斜程度的劃分,機器人檢測相對應(yīng)的紅外傳感器距離值,不斷調(diào)整機器人姿態(tài),使機器人正對房門并順利通過。
4 結(jié)束語
本文設(shè)計的家庭服務(wù)機器人系統(tǒng),為智能家居環(huán)境服務(wù)對象的需求任務(wù)提出了詳細可行的解決方案。整個系統(tǒng)應(yīng)用了基于XBee模塊的主流無線通信技術(shù),以保證數(shù)據(jù)的傳輸速率。此外,對輪式機器人的模塊化設(shè)計具有結(jié)構(gòu)簡單和性能穩(wěn)定等特點,大大提高了家庭服務(wù)機器人的可靠性,并且降低了系統(tǒng)的硬件成本。自主決策過程中的路徑規(guī)劃,使得機器人能夠快速沿著最合適的路線移動??傊?,該設(shè)計系統(tǒng)對家庭服務(wù)機器人相關(guān)問題的解決提供了可借鑒的方法。
推薦閱讀:



