

【導(dǎo)讀】汽車隊(duì)控制系統(tǒng)的要求不斷提升,AD采樣設(shè)計(jì)模塊也成為汽車控制中不可或缺的部分。AD采樣的速度和精度關(guān)系到汽車控制器的執(zhí)行。本文中詳述了基于MPC5634的控制器多路AD采樣的方案,通過增強(qiáng)型內(nèi)存訪問(DMA)方式,在自動(dòng)在增強(qiáng)型隊(duì)列式模數(shù)轉(zhuǎn)換器eQADC模塊和RAM之間自動(dòng)轉(zhuǎn)移數(shù)據(jù),使模擬信號(hào)的采集更加精準(zhǔn)高效。
一、增強(qiáng)型存儲(chǔ)器直接訪問(DMA)模塊
DMA控制器是總線上的一個(gè)主機(jī),能夠在片內(nèi)資源(Flash 、RAM和I/O外設(shè)等)以及片外資源之間傳輸數(shù)據(jù)。DMA有32個(gè)通道,在某個(gè)時(shí)刻只能有一個(gè)通道成為總線上的主機(jī)并進(jìn)行數(shù)據(jù)傳輸。為了解決他們之間的沖突,DMA有兩種可編程的優(yōu)先級(jí)機(jī)制:固定優(yōu)先級(jí)機(jī)制和輪詢優(yōu)先級(jí)機(jī)制。一旦一個(gè)通道成為主機(jī),該通道將通過先讀再寫的操作方式,把數(shù)據(jù)從一個(gè)存儲(chǔ)器地址傳輸?shù)搅硪粋€(gè)存儲(chǔ)器地址。每個(gè)DMA通道都有一個(gè)獨(dú)立的傳輸控制描述符(TDCn)。
二、增強(qiáng)型隊(duì)列式模數(shù)轉(zhuǎn)換器eQADC模塊
1、eQADC的命令格式
eQADC有配置命令和轉(zhuǎn)換命令兩種命令格式。配置命令用于對(duì)eQADC模塊進(jìn)行初始化設(shè)置,像使能ADC模塊單元,設(shè)置時(shí)鐘分頻因子,轉(zhuǎn)換速率因子,使能DMA請(qǐng)求等;轉(zhuǎn)換命令主要用于設(shè)置采集哪個(gè)通道,用哪個(gè)ADC模塊單元轉(zhuǎn)換,轉(zhuǎn)換的結(jié)果放在6個(gè)結(jié)果緩存的哪一個(gè)里面,是否對(duì)采集的結(jié)果進(jìn)行校正等。
2、eQADC模塊的結(jié)構(gòu)
MPC5634的eQADC模塊有兩個(gè)可獨(dú)立工作的ADC轉(zhuǎn)換單元(ADC0和ADC1),40路模擬通道(可擴(kuò)展),0~5V的轉(zhuǎn)換范圍,轉(zhuǎn)換精度有8位、10位、12位三種精度可選,具有軟件和硬件兩種觸發(fā)方式,采樣方式有單次方式和連續(xù)方式等,ADC的工作時(shí)鐘可達(dá)15MHz.速率和精度可以滿足汽車控制器的要求。圖1為eQADC模塊的結(jié)構(gòu)框圖,顯示了eQADC模塊的主要組成部分。
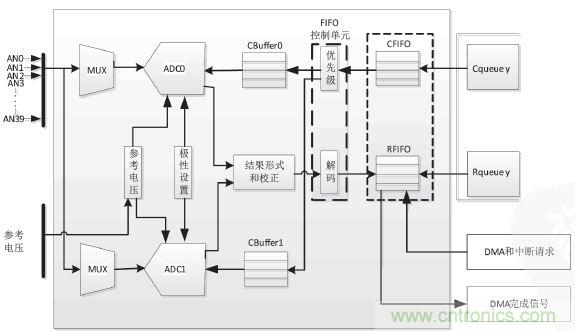
圖1:eQADC模塊的結(jié)構(gòu)框圖
3、命令緩存CFIFO的工作機(jī)制
eQADC模塊有6個(gè)命令緩存CFIFO,每個(gè)CFIFO有4個(gè)深度,CFIFO有單次掃描和連續(xù)掃描的操作模式,配置為不同的掃描模式時(shí),CFIFO就有不同的觸發(fā)機(jī)制。當(dāng)配置為單次掃描模式時(shí),每次會(huì)使存儲(chǔ)于隊(duì)列中的eQADC轉(zhuǎn)換命令序列執(zhí)行一次。當(dāng)設(shè)置為連續(xù)掃描模式時(shí),只要隊(duì)列啟動(dòng)后,就可以持續(xù)的運(yùn)行。數(shù)據(jù)的流程如圖2所示。
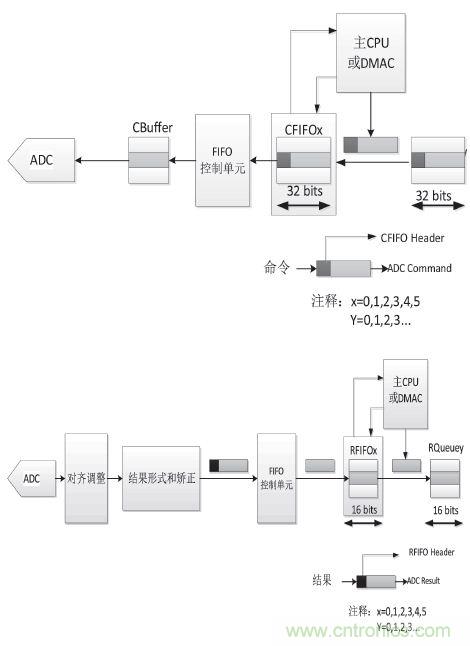
圖2:數(shù)據(jù)流程
[page]
三、多路eQADC采樣程序設(shè)計(jì)
在這次的設(shè)計(jì)中,數(shù)據(jù)的傳輸是通過DMA進(jìn)行的。多路eQADC采樣程序設(shè)計(jì)主要包括命令隊(duì)列、結(jié)果隊(duì)列的定義,eQADC的初始化,DMA初始化,觸發(fā)CFIFO等。程序的設(shè)計(jì)流程如圖3。
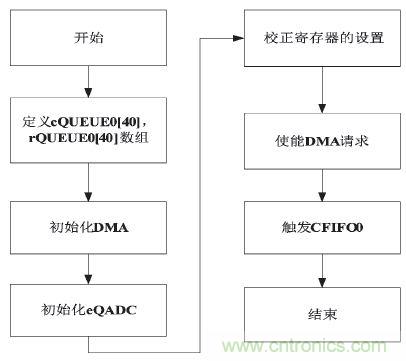
圖3:程序流程
1、定義數(shù)組
本文中cQUEUE0[40]被定義為轉(zhuǎn)換命令的存儲(chǔ)數(shù)組,rQUEUE0[40]被定義為轉(zhuǎn)換結(jié)果的存儲(chǔ)數(shù)組。把所有通道的轉(zhuǎn)換命令分別放在數(shù)組cQUEUE0[40]中,最后采集的結(jié)果分別放在數(shù)組rQUEUE0[40]中,這個(gè)可以隨時(shí)讀取rQUEUE0[40]中的數(shù)據(jù)被汽車控制器所用。
2、初始化DMA
TCD0對(duì)應(yīng)于CFIFO0,TCD1對(duì)應(yīng)于RFIFO0.由于本設(shè)計(jì)只要一個(gè)命令緩存CFIFO0和一個(gè)結(jié)果緩存RFIFO0就可以滿足設(shè)計(jì)要求,故只用到一個(gè)CFIFO0,一個(gè)RFIFO0,以及與他們對(duì)應(yīng)的TCD0和TCD1.設(shè)置TCD0:源地址為&cQUEUE0,目的地址為0xFFF80010,源地址偏移為4,傳輸?shù)拇笮?2位,次要字節(jié)傳輸數(shù)NBYTES為2;主迭代數(shù)為40;設(shè)置TCD1:源地址為&rQUEUE0,目的地址為0xFFF80032,源地址偏移為4,傳輸?shù)拇笮?6位,次要字節(jié)傳輸數(shù)NBYTES為2;主迭代數(shù)為40.
3、初始化eQADC
初始化轉(zhuǎn)換命令的存儲(chǔ)數(shù)組cQUEUE0[40],本設(shè)計(jì)是采用ADC0模塊單元,12位精度,采用校正,一次采集40個(gè)通道的模擬量。配置eQADC的寄存器,時(shí)鐘分頻因子為2,使能DMA0,DMA1請(qǐng)求等。
4、校正寄存器的設(shè)置
本項(xiàng)目的芯片功能很強(qiáng)大,以前的校正都需要外面加硬件來校正采樣結(jié)果,MPC5634自帶的有校正功能,本項(xiàng)目采用的校正是這樣的:ADC的初步轉(zhuǎn)換結(jié)果將通過MAC單元來完成校正。MAC單元執(zhí)行下列算法來進(jìn)行校正:
Idealresult=GCCXADCresult+OCC+2 (1)
GCC為增益校正的常數(shù),它是在寄存器ADCn_GCCR中定義的;OCC為偏移量校正常數(shù),它在寄存器ADCn_OCCR中定義的。
GCCR與OCCR的值是需要計(jì)算來確定的。通過以下公式進(jìn)行求解:
Idealresult1=GCCXADCresult1+OCC+2 (2)
Idealresult1=GCCXADCresult1+OCC+2 (3)
為了求出GCCR與OCCR的值,我們只需要兩個(gè)通道的理想結(jié)果和實(shí)際的結(jié)果就行了,通道44和通道43的電壓值分別對(duì)應(yīng)0.25Vdd和0.5Vdd.而他們的實(shí)際結(jié)果可以采集到。因此,可以求出GCCR和OCCR的值。
5、使能DMA請(qǐng)求
設(shè)置使能DMA0和DMA1請(qǐng)求。
6、觸發(fā)CFIFO0
設(shè)置CFIFO0為連續(xù)轉(zhuǎn)換模式,這樣就可以連續(xù)、持續(xù)地采集信號(hào),并及時(shí)把采集的結(jié)果放到結(jié)果存儲(chǔ)數(shù)組中,如此就可以保證汽車控制器在結(jié)果存儲(chǔ)數(shù)組中所讀取的數(shù)據(jù)為最新的采集結(jié)果,可以使控制器根據(jù)最新的數(shù)據(jù)來控制各個(gè)執(zhí)行器。




