

【導讀】本文將說明電信系統(tǒng)中激光二極管熱控制系統(tǒng)的組成,并介紹主要器件的關(guān)健規(guī)格。本文的目的是從系統(tǒng)角度闡述各項設(shè)計考慮,為設(shè)計人員構(gòu)建一個具有良好溫度控制精度、低損耗、小尺寸的高性能系統(tǒng)提供全局性指南。
簡介
在光纖電信系統(tǒng)中,激光二極管用作發(fā)送信號的發(fā)射激光器,以及摻鉺光纖放大器(EDFA)和光放大器(SOA)的泵激光器。在這些應用中,激光器的特性(包括波長、平均光功率、效率和消光比)必須保持穩(wěn)定以確保電信系統(tǒng)的整體性能良好。然而,這些特性取決于激光器的溫度:只要溫度發(fā)生漂移,波長就會改變,轉(zhuǎn)換效率將會降低。要求的溫度穩(wěn)定性介于±0.001°C至±0.5°C,具體數(shù)值視應用而定。
為了控制溫度,需要一個由熱敏電阻、熱電冷卻器(TEC)和TEC控制器組成的環(huán)路。熱敏電阻的阻值與溫度成比例變化(反比或正比,取決于熱敏電阻類型),當配置為分壓器時,可利用它來將溫度轉(zhuǎn)換為電壓。TEC控制器將該反饋電壓與代表目標溫度的基準電壓進行比較,然后控制流經(jīng)TEC的電流,從而調(diào)整TEC傳輸?shù)臒崃俊?/div>
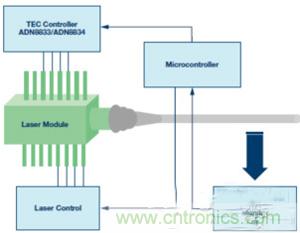

上述系統(tǒng)的一般框圖如圖1所示。激光二極管、TEC和熱敏電阻位于激光模塊內(nèi)部。TEC控制器ADN8833或ADN8834讀取熱敏電阻的反饋電壓,并向TEC提供驅(qū)動電壓。使用微控制器監(jiān)測和控制熱環(huán)路。注意,熱環(huán)路也可以在模擬電路中構(gòu)建。ADN8834內(nèi)置兩個零漂移斬波放大器,可將其用作PID補償器。
本文將說明電信系統(tǒng)中激光二極管熱控制系統(tǒng)的組成,并介紹主要器件的關(guān)健規(guī)格。本文的目的是從系統(tǒng)角度闡述各項設(shè)計考慮,為設(shè)計人員構(gòu)建一個具有良好溫度控制精度、低損耗、小尺寸的高性能系統(tǒng)提供全局性指南。
圖1.激光模塊的溫度控制系統(tǒng)
TEC:熱電冷卻技術(shù)
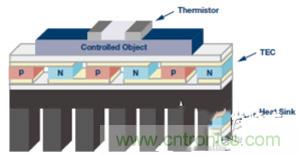
熱電冷卻器包括兩片表面陶瓷板,其間交替放置P型和N型半導體陣列,如圖2所示。
當電流流經(jīng)這些導體時,熱量將在一端吸收并在另一端釋放;當電流方向相反時,熱傳輸也會反向。該過程稱為珀爾帖效應。N型半導體中的載流子是電子,因此,其載流子和熱量從陽極流向陰極。對面的P型半導體具有空穴載流子,熱量也沿相反方向流動。
圖2.帶散熱器的TEC模塊
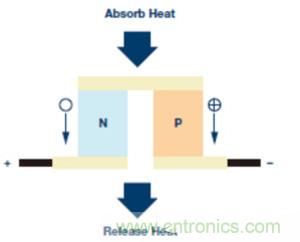
取一對P-N半導體對,用金屬板將其連接起來,如圖3所示;當電流流過時,熱量將沿一個方向傳輸。
改變直流電壓的極性可改變熱傳輸方向,傳輸?shù)臒崃颗c電壓幅度成比例。由于既簡單又魯棒,熱電冷卻被廣泛用于電信系統(tǒng)的熱調(diào)理。
圖3.珀爾帖效應:P-N半導體對的熱流
選擇TEC模塊
選擇TEC模塊時,需要考慮系統(tǒng)中的許多因素,如環(huán)境溫度、對象目標溫度、熱負荷、電源電壓和模塊的物理特性等。必須認真評估熱負荷,確保所選TEC模塊有足夠的容量來將熱量從系統(tǒng)泵出以維持目標溫度。TEC模塊制造商在數(shù)據(jù)手冊中通常會提供兩條性能曲線。一條曲線顯示電源電壓范圍內(nèi)不同溫差(ΔT)下的熱傳輸容量,另一條曲線顯示電源電壓和ΔT的不同組合所需要的冷卻/加熱電流。設(shè)計人員可以估計模塊的功率容量,確定它能否滿足特定應用需要。
TEC控制器操作和系統(tǒng)設(shè)計
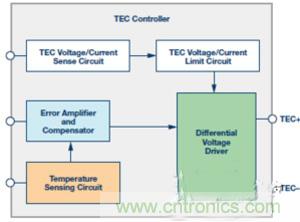
為了利用TEC補償溫度,TEC控制器應能根據(jù)反饋誤差產(chǎn)生可逆差分電壓,并提供適當?shù)碾妷汉碗娏飨拗?。圖4為ADN8834的簡化系統(tǒng)框圖。主要功能模塊包括溫度檢測電路、誤差放大器和補償器、TEC電壓/電流檢測和限值電路、差分電壓驅(qū)動器。
圖4.單芯片TEC控制器ADN8834功能框圖
差分電壓驅(qū)動器
TEC控制器輸出一個差分電壓,使得通過TEC的電流可以帶走連接到TEC的對象的熱量,或者平穩(wěn)地變?yōu)橄喾礃O性以加熱該對象。電壓驅(qū)動器可以是線性模式、開關(guān)模式或混合電橋。線性模式驅(qū)動器更簡單且更小,但效率不佳。開關(guān)模式驅(qū)動器具有良好的效率——高達90%以上——但輸出端需要額外的濾波電感和電容。ADN8833和ADN8834使用混合配置,含有一個線性驅(qū)動器和一個開關(guān)模式驅(qū)動器,體積較大濾波元件的數(shù)量減半,同時能夠保持高效率性能。
電壓驅(qū)動器設(shè)計對控制器至關(guān)重要,因為它占用了大部分功耗和電路板空間。優(yōu)化的驅(qū)動器級有助于最大程度地縮減功率損耗、電路尺寸、散熱器需求和成本。
利用NTC熱敏電阻檢測溫度
圖5顯示了負溫度系數(shù)(NTC)熱敏電阻在溫度范圍內(nèi)的阻抗。由于它與溫度具有相關(guān)性,因此可將其連接為分壓器,從而將溫度轉(zhuǎn)換為電壓。典型連接如圖6所示。當RTH隨溫度而變化時,VFB也會變化。增加一個Rx與熱敏電阻串聯(lián),便可相對于VREF將溫度電壓傳遞函數(shù)線性化,如圖7所示。必須將其與模塊殼內(nèi)部的激光器緊密耦合,隔絕外部溫度波動影響,使其能精確檢測溫度。
誤差放大器和補償器
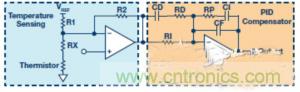
模擬熱反饋環(huán)路包括兩級,由兩個放大器構(gòu)成,如圖8所示。第一個放大器接受熱反饋電壓(VFB),將該輸入轉(zhuǎn)換或調(diào)節(jié)為線性電壓輸出。此電壓代表對象溫度,饋入補償放大器中,與溫度設(shè)定電壓進行比較,產(chǎn)生一個與二者之差成比例的誤差電壓。第二個放大器通常用來構(gòu)建一個PID補償器,后者包括一個極低頻率極點、兩個不同的較高頻率零點和兩個高頻極點,如圖8所示。
PID補償器可通過數(shù)學方法或經(jīng)驗方法確定。要從數(shù)學上模擬熱環(huán)路,需要TEC、激光二極管、連接器和散熱器的精確熱時間常數(shù),這不太容易獲得。利用經(jīng)驗方法調(diào)諧補償器更為常見。通過假定溫度設(shè)定端具有某個階躍函數(shù)并改變目標溫度,設(shè)計人員可以調(diào)整補償網(wǎng)絡(luò),使TEC溫度的建立時間最短。
激進補償器會對熱擾動快速作出反應,但也很容易變得不穩(wěn)定,而保守補償器建立得較慢,但能耐受熱擾動,發(fā)生過沖的可能性更小。系統(tǒng)穩(wěn)定性和響應時間之間必須達到平衡。
圖8.使用ADN8834內(nèi)部兩個斬波放大器的熱反饋環(huán)路圖
TEC控制器系統(tǒng)的關(guān)鍵性能
溫度調(diào)節(jié)精度
有時候,即便PID補償器設(shè)計得當,穩(wěn)態(tài)誤差仍會存在。下面是可能引起該誤差的幾個因素。
TEC熱功率預算:設(shè)計該系統(tǒng)時,TEC和電源電壓是最先選定的事情。然而,由于熱負荷不容易估計,選擇可能不正確。某些情況下,若將最大功率應用于TEC但仍不能達到目標溫度,可能意味著熱功率預算不足以處理熱負荷。提高電源電壓或挑選具有更高功率額定值的TEC可解決這個問題。
基準電壓源一致性:基準電壓源會隨溫度和時間而漂移,對于閉合熱環(huán)路,這通常不是問題。但是,尤其是在數(shù)字控制系統(tǒng)中,TEC控制器和微控制器的基準電壓源可能有不同的漂移,引起補償器不會察覺的誤差。建議這兩個電路采用相同的基準源,用具有較高驅(qū)動能力的電壓覆蓋另一電壓。
溫度檢測:為使溫度誤差最小,精確檢測負載溫度非常重要。任何來自反饋的誤差都會進入系統(tǒng),補償器同樣不能糾正這種誤差。使用高精度熱敏電阻和自穩(wěn)零放大器可避免誤差。熱敏電阻的布置也很重要。確保將它安裝到激光器上,以便能夠讀取我們要控制的實際溫度。
效率
TEC控制器的大部分功耗是由驅(qū)動器級消耗的。在ADN8833/ADN8834中,線性驅(qū)動器的功耗可根據(jù)輸入至輸出壓降和負載電流直接得出。開關(guān)模式驅(qū)動器的損耗較為復雜,大致可分解為三部分:傳導損耗、開關(guān)損耗和轉(zhuǎn)換損耗。傳導損耗與FET的RDSON和濾波電感的直流電阻成比例。選擇低電阻元件可降低傳導損耗。開關(guān)損耗和轉(zhuǎn)換損耗高度依賴于開關(guān)頻率。頻率越高,損耗越高,但無源元件尺寸可減小。為實現(xiàn)最優(yōu)設(shè)計,必須仔細權(quán)衡效率與空間。
噪聲和紋波
ADN8833/ADN8834中的開關(guān)模式驅(qū)動器以2 MHz頻率切換,快速PWM開關(guān)時鐘沿包含很寬的頻譜,會在TEC端產(chǎn)生電壓紋波,并且在整個系統(tǒng)中產(chǎn)生噪聲。增加適當?shù)娜ヱ詈图y波抑制電容可降低噪聲和紋波。
對于開關(guān)模式電源常用的降壓拓撲,電源電壓軌上的紋波主要由PWM FET斬波的斷續(xù)電流所引起。并聯(lián)使用多個SMT陶瓷電容可降低ESR(等效串聯(lián)電阻)并在局部給電源電壓去耦。在開關(guān)模式驅(qū)動器輸出節(jié)點,電壓紋波由濾波電感的電流紋波引起。為抑制此紋波,應在驅(qū)動器輸出端到地之間并聯(lián)使用多個SMT陶瓷電容。紋波電壓主要由電容ESR與電感紋波電流的乘積決定:ΔV_TEC = ESR × ΔI_L并聯(lián)使用多個電容可有效降低等效ESR。
結(jié)論
設(shè)計電信系統(tǒng)中激光二極管的TEC控制器系統(tǒng)是一項很復雜的工作。除了熱精度方面的挑戰(zhàn)之外,封裝尺寸通常非常小,功耗容差也很低。一般而言,設(shè)計精良的TEC控制器應具備如下優(yōu)點:精準溫度調(diào)節(jié)、高效率、板尺寸很小、低噪聲、電流和電壓監(jiān)控與保護。





