

【導(dǎo)讀】近年來,全國許多地方的機器人企業(yè)如雨后春筍般涌現(xiàn),據(jù)統(tǒng)計,目前全國已有5000多家機器人公司。與此同時,“機器人換人”也從廣東、浙江等地逐漸輻射到其他諸多省市。中國機器人市場一片火熱景象。包括像長虹、美的、格力、海爾在內(nèi)的家電業(yè)巨頭也紛紛跨界進(jìn)軍機器人領(lǐng)域。機器人產(chǎn)業(yè)作為“中國制造2025”重點突破的十大領(lǐng)域之一,已然成為新時代的寵兒。
現(xiàn)在,每天和機器人相關(guān)的消息層出不窮。機器人現(xiàn)已滲透到各行各業(yè)中。面對一片火熱的機器人景象,那么就要說到一個非常重要的問題,就是機器人的工作方式。其實這是一個很容易想到的同時也會引起大家好奇心的一個問題,既然大家有目共睹發(fā)展的風(fēng)生水起的機器人市場,那么我們用機器人來做什么呢,當(dāng)然是讓它應(yīng)用在不同的領(lǐng)域上發(fā)揮各自的優(yōu)勢了。例如現(xiàn)在應(yīng)用的焊接機器人、噴涂機器人、碼垛機器人以及大家都覺得很有前景的服務(wù)機器人等等。機器人本身是無意識的,那么我們就要通過所謂的“機器人編程”讓它“活躍起來”,所以我們有機器人是完全不夠的,讓機器人應(yīng)用在不同的領(lǐng)域上才是王道。
那么機器人是如何完成既定的工作的呢?
機器人的工作方式一般分為機器人示教編程和機器人離線編程。近些年來,工業(yè)機器人被廣泛應(yīng)用于沖壓、壓鑄、熱處理、焊接、涂裝、加工、裝配等各個環(huán)節(jié)。通常工業(yè)機器人控制程序采用示教方式產(chǎn)生,這種編程方式在簡單的軌跡路徑、較低的精度要求和簡單的操作對象的情況下,具有可靠、高效、低成本和易于實現(xiàn)等優(yōu)點。因此,示教方式仍是工業(yè)機器人的主要編程方式。
隨著產(chǎn)品復(fù)雜程度和制造精度要求的提高,示教方式生成機器人控制程序的方法已不能滿足生產(chǎn)需要,因而亟需發(fā)展機器人離線編程技術(shù)。來自北京華航唯實的技術(shù)團隊研發(fā)了國內(nèi)首款機器人離線編程軟件RobotArt,RobotArt利用成熟的CAD/CAM技術(shù),結(jié)合工業(yè)機器人離線編程技術(shù),形成了機器人離線編程系統(tǒng),提高機器人編程效率,從而實現(xiàn)提升系統(tǒng)的制造柔性、提高生產(chǎn)效率和產(chǎn)品質(zhì)量。離線編程的出現(xiàn),徹底打破了“工業(yè)機器人危險,人類勿近”的經(jīng)驗桎梏。
既然離線編程是咱們今天的主角,那么今天就不妨說說。由于國內(nèi)的離線編程與國外相比起步較晚,所以估計早些時間業(yè)內(nèi)人員只要一談到和離線編程相關(guān)的話題,免不了想到RobotMaster、Robotworks、RobotStudio這樣在機器人離線編程界首屈一指的大牛們。不過對于國內(nèi)的機器人離線編程來說其并不是止步不前的,國內(nèi)也一直在專注于對離線編程的研究。而且現(xiàn)在國家大力扶持機器人產(chǎn)業(yè),在國家的支持以及相關(guān)專業(yè)人員的深入研究上,國內(nèi)機器人離線編程系統(tǒng)的發(fā)展也給大家來了個觸不及防。最典型的就是來自北京華航唯實的RobotArt,這款號稱國內(nèi)首款的機器人離線編程軟件確實名不虛傳,在業(yè)內(nèi)的名氣還是響當(dāng)當(dāng)?shù)摹,F(xiàn)在,當(dāng)再次談到離線編程時我們不僅會想到RobotMaster、Robotworks、RobotStudio,同樣RobotArt也會出現(xiàn)在其中。這是國內(nèi)首款機器人離線編程軟件,也在屬于它的領(lǐng)域上綻放光彩,發(fā)揮著不可替代的作用。
現(xiàn)在就先給大家簡單介紹一下離線編程到底是怎樣進(jìn)行工作的呢?
首先我們會在軟件里重建整個工作場景的三維虛擬環(huán)境。

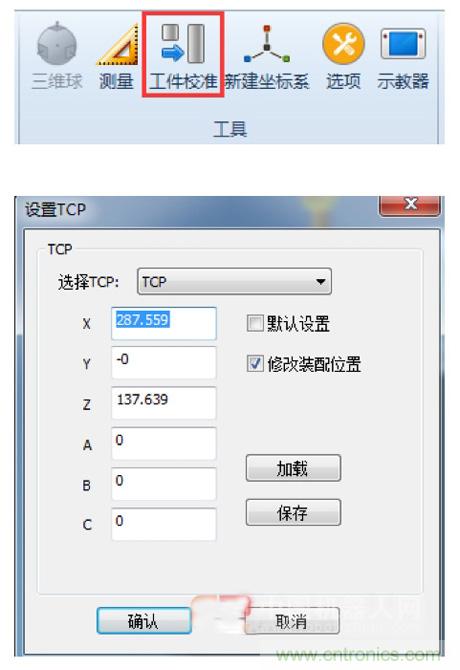
然后,我們對零件的三維模型進(jìn)行工件校準(zhǔn)以及對工具的TCP進(jìn)行設(shè)置,完成此步驟后零件和工具的位置就已經(jīng)和實際的位置保持一致了。
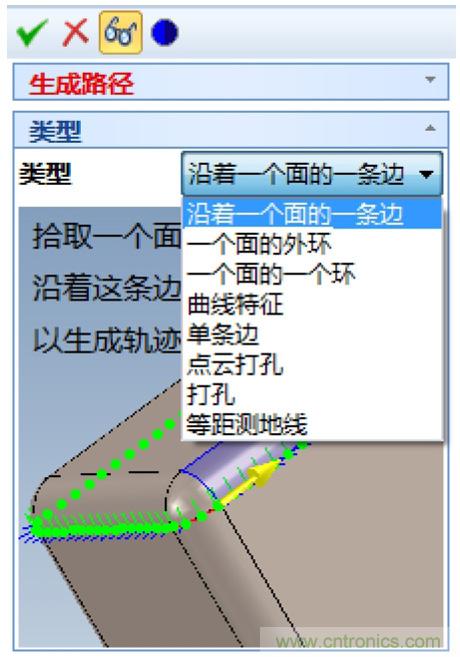
接下來就是對軌跡進(jìn)行設(shè)計了,軟件里提供了8種基本軌跡的生成方式,根據(jù)應(yīng)用場景的不同選擇不同的軌跡生成方式,簡單實用。軌跡的生成方式可是RobotArt的強項哦!8種軌跡生成方式任你選。
然后進(jìn)行機器人的仿真工作,在仿真過程中可以檢測出機器人是否可以正常工作,如果仿真過程中出現(xiàn)軸限位、不可達(dá)時機器人就會停止當(dāng)前的工作并且在輸出窗口中會輸出相應(yīng)的仿真信息。同時在仿真過程中開啟碰撞檢測功能,可以檢測機器人和零件之間是否發(fā)生碰撞,避免真實運行中出現(xiàn)不必要的損失。

最后只需點擊一下后置,我們設(shè)計好的軌跡就可以轉(zhuǎn)化為機器人可識別的語言供機器人按照我們設(shè)計的軌跡進(jìn)行工作。

整個工作的大致流程僅需搭建設(shè)計環(huán)境——軌跡設(shè)計——仿真——后置四步整個離線編程的過程就可以輕松搞定。
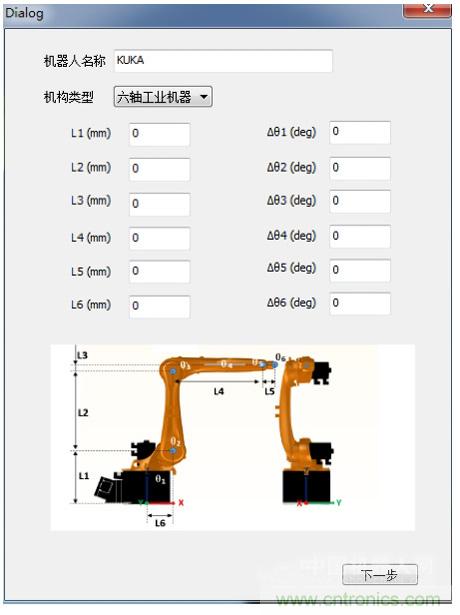
上面說到的只是RobotArt必不可少的功能,起著至關(guān)重要的作用呢,但是呢這些功能還只是RobotArt的冰山一角哦!聽說最新版本的RobotArt可以自定義機器人哦,想想就好高大上的感覺,自己想用的機器人可以在軟件里定義出來了,感覺這又是RobotArt的一大創(chuàng)舉。
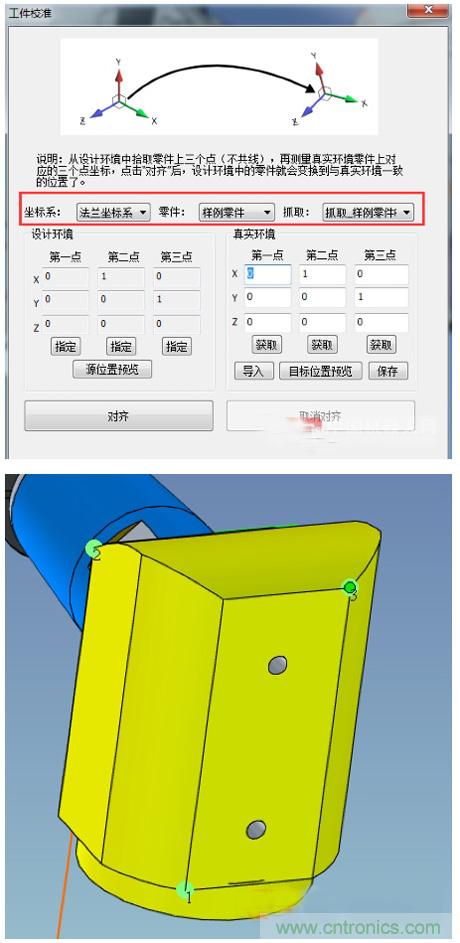
手持工件在RobotArt里也可以進(jìn)行校準(zhǔn)了,最開始接觸這款離線編程軟件的時候工件校準(zhǔn)只適用于機器人用法蘭工具對其加工的零件,其實很多情況下也是需要機器人手持工件進(jìn)行工作的,RobotArt真是來者不懼,竟然把這個功能也做進(jìn)去了。
最近在用官網(wǎng)上新版本的RobotArt,看了更新說明之后發(fā)現(xiàn)確實新增了好多比較實用的功能,每次在使用時都想要是有這個那個功能該多好,發(fā)現(xiàn)這次竟然把理想變成里現(xiàn)實。幾個月不見,感覺RobotArt確實進(jìn)步不小。突然好想說一句,只要用心做好每件事,什么時候都不晚,只要用心做,理想就不再是理想了。
從最開始接觸機器人,到進(jìn)一步去學(xué)習(xí)機器人的工作方式即示教編程和離線編程,離線編程確實克服了示教編程的很多缺點,大大提高了機器人的工作效率。離線編程的出現(xiàn)使得機器人的工作更加的簡單,使得原來看似繁瑣甚至不可能的工作在它面前也能變得游刃有余。




