

【導(dǎo)讀】近年來,永磁同步電動機(jī)(PMSM)在電動車輛、電動飛機(jī)、機(jī)器人以及家用電器等工業(yè)制造中已經(jīng)得到了越來越廣泛的應(yīng)用。而在永磁同步電機(jī)(PMSM)中,最常使用到的一項技術(shù)就是矢量控制,因為它可以實現(xiàn)更好的動態(tài)響應(yīng),充分發(fā)揮機(jī)器的潛力。
但若想實現(xiàn)矢量控制,就必須要確定轉(zhuǎn)子的速度和位置。最常用的電機(jī)速度和位置測量傳感器有光傳感器和霍爾傳感器。但這兩種傳感器都非常昂貴,會無形增加驅(qū)動系統(tǒng)的成本。
這里跟大家分享一種比較有前景的PMSM驅(qū)動解決方案,它將低成本的磁性角度傳感器與動態(tài)觀測器結(jié)合在一起,同樣也能測量出精確的轉(zhuǎn)子速度。本文為您展示的MPS電機(jī)控制模塊就屬于此類解決方案,模塊包含了一個電機(jī)控制ASIC、一個磁性角度傳感器、3相MOSFET功率級和PCB預(yù)驅(qū)動器,適用于NEMA 23和NEMA 17 兩種型號的電機(jī)產(chǎn)品。
電機(jī)控制ASIC為電機(jī)驅(qū)動應(yīng)用提供了極好的計算能力。該模塊配合MA702(一款12位分辨率磁性角度傳感器),可以檢測出PMSM電機(jī)的絕對位置。MA702的成本要遠(yuǎn)低于光傳感器和霍爾傳感器。由于能夠了解整個過程中轉(zhuǎn)子的位置,所以可以通過建立基于PMSM機(jī)械方程的動態(tài)狀態(tài)觀測器來檢測電機(jī)速度。ASIC可以使用動態(tài)觀測器過濾掉位置測量所產(chǎn)的白噪音并估計出轉(zhuǎn)子速度,從而在PMSM中使用磁場定向控制。
PMSM磁場定向控制
三相PMSM機(jī)械公式可以用方程組(1)表示:
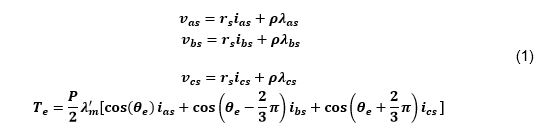
其中v、i和λ分別表示電壓、電流和磁鏈。下標(biāo)a、b和c表示相位a、b和c的變量。下標(biāo)s為定子變量,ρ為特定值導(dǎo)數(shù),P為PMSM的極數(shù)。
電磁轉(zhuǎn)矩T_e由三相電流和轉(zhuǎn)子磁鏈生成。λ_m^’為PMSM定子側(cè)檢測到的轉(zhuǎn)子磁鏈。角度θ_e為轉(zhuǎn)子磁鏈和A相定子之間的電磁角度。
為實現(xiàn)PMSM的FOC功能,需使用q-d下方的動態(tài)模型來解耦氣隙磁鏈和電磁轉(zhuǎn)矩。根據(jù)Clarke-Park變換計算公式,同步旋轉(zhuǎn)q-d軸方程組(1)中的PMSM模型使用方程組(2)計算:

其中下標(biāo)q-d為q-d軸變量。L_為自感系數(shù),L_m為機(jī)械互感系數(shù)。為更加簡化控制,轉(zhuǎn)子磁鏈應(yīng)與d-軸對齊,此時q-軸磁鏈則為零。磁鏈?zhǔn)褂梅匠探M(3)計算:

電磁轉(zhuǎn)矩使用公式(4)計算:
根據(jù)方程組(1)、(2)、(3)和(4)的變換步驟,磁鏈可以直接由d軸電流控制。由于i_ds為常量,所以可以直接通過控制q軸電流來控制轉(zhuǎn)矩T_e。如果保持i_ds=0,則電磁轉(zhuǎn)矩直接與i_qs成正比。
由上述推導(dǎo)可以得到圖1中的PMSM FOC原理圖。
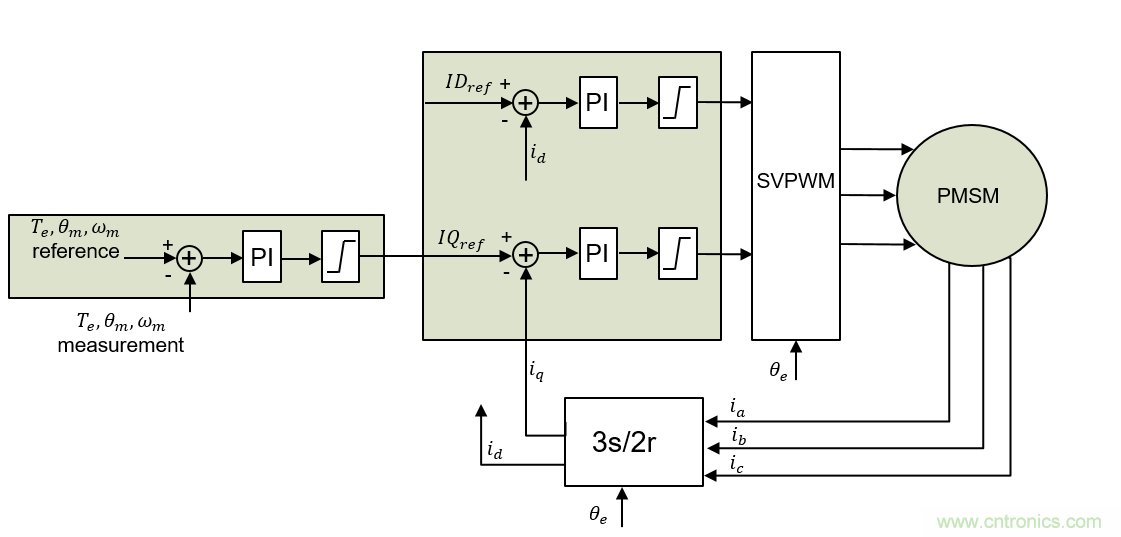
圖 1:PMSM FOC 原理圖
首先,對比外回路參考值與測量的反饋值,然后反饋輸入差值至控制器(通常使用PI控制器),從而生成指令轉(zhuǎn)矩電流IQ_ref。根據(jù)磁鏈要求設(shè)置d軸電流參考值ID_ref。電流調(diào)節(jié)器/控制器 VD_ref、VQ_ref、VD_ref和VQ_ref的輸出值是空間矢量PWM(SVPWM)的輸入值。SVPWM塊為變換器生成柵極信號用來驅(qū)動PMSM。
基于無速度傳感器驅(qū)動的動態(tài)觀測器
MA702可以檢測永磁體θ_e的位置。轉(zhuǎn)子的速度可以通過公式ω_e=ρθ_e計算得出。作為一個數(shù)字傳感器,MA702一定會在測量位置產(chǎn)生噪聲。如果直接使用位置差分器獲取電機(jī)的速度,則會破壞控制操作。解決這個問題最常見的方法是添加一個數(shù)字濾波器/觀測器。
可以使用方程組(5)基于機(jī)械PMSM模型構(gòu)建系統(tǒng)觀測器:

其中,T_e為電磁轉(zhuǎn)矩,T_l為負(fù)載轉(zhuǎn)矩。ω_m和θ_m為機(jī)械轉(zhuǎn)子速度和位置,而ω_e和θ_e則為電動轉(zhuǎn)子速度和位置。機(jī)械速度和位置乘以P/2等于電氣速度和位置。P為PMSM的極數(shù)。參數(shù)J和B分別表示PMSM的慣性和以及轉(zhuǎn)子與負(fù)載的組合粘性摩擦力。
MA702將絕對轉(zhuǎn)子位置反饋到電機(jī)控制ASIC,使機(jī)械模型系統(tǒng)矩陣A成為一個簡單的3x3矩陣,僅需兩個非零元素。更簡單的系統(tǒng)矩陣有助于減少MCU的計算負(fù)擔(dān),使算法更容易實現(xiàn),執(zhí)行速度更快。
使用歐拉(Euler)方法將方程組(5)中的PMSM力學(xué)模型離散化。狀態(tài)變量x,∈和R ^ n作為系統(tǒng)過程的狀態(tài),離散時間可以用方程組(6)表示:
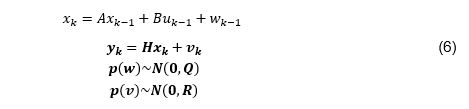
其中u是輸入變量,y是輸出測量值。w和v分別表示具有Q和R噪聲方差的過程噪聲和測量噪聲。
根據(jù)經(jīng)典控制理論,具有估計增益 K 的狀態(tài)觀測器可以用等式(7)計算:

(∧) 表示了估計變量。與使用恒定增益 K 經(jīng)典狀態(tài)觀測器不同,動態(tài)觀測器在每次迭代時遞歸地更新其觀測器增益 K 。
與FOC原理圖(參見圖1)相比,基于動態(tài)速度觀測器的驅(qū)動器原理圖使用機(jī)器測量作為系統(tǒng)輸入來執(zhí)行觀測器(參見圖2)。動態(tài)觀測器輸出濾波/估計的轉(zhuǎn)子速度。轉(zhuǎn)子位置用于傳導(dǎo)PMSM的FOC。
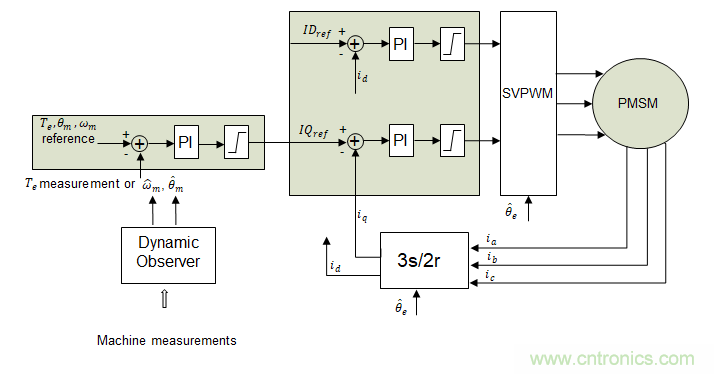
圖 2:基于 PMSM FOC的動態(tài)觀測器
仿真結(jié)果
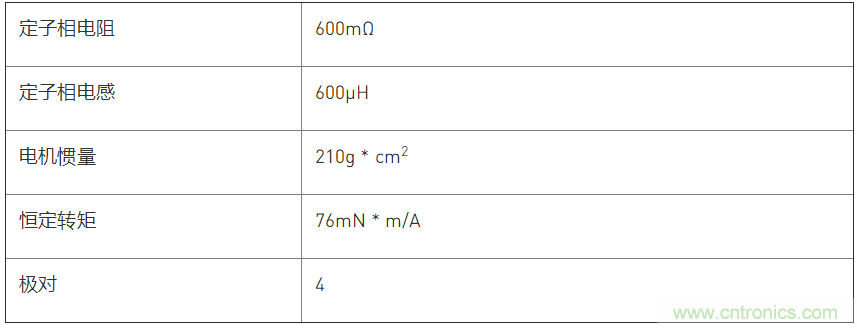
使用Matlab/Simulink得出仿真結(jié)果。用于驗證算法的電機(jī)是MPS eMotion SystemTM智能電機(jī)MMP757094-36。MMP757094-36 是一款適用于伺服電機(jī)應(yīng)用的全集成智能電機(jī)解決方案系列產(chǎn)品。表1列出了電機(jī)參數(shù)。
表 1: 電機(jī)參數(shù)
首先,將恒速參考值(500rpm)反饋至系統(tǒng),以說明動態(tài)觀測器在瞬態(tài)期間是如何工作的。
圖3顯示了估計速度如何跟蹤實際電機(jī)速度。估計速度和實際速度在大約0.05s后都達(dá)到了穩(wěn)定狀態(tài)。圖4示出了在速度響應(yīng)穩(wěn)定之后,誤差方差矩陣行列式的絕對值下降到零。動態(tài)觀測器增益隨速度的響應(yīng)而變化。在瞬態(tài)周期之后,觀測器的增益K 變?yōu)楹愣ㄔ鲆妗?/div>
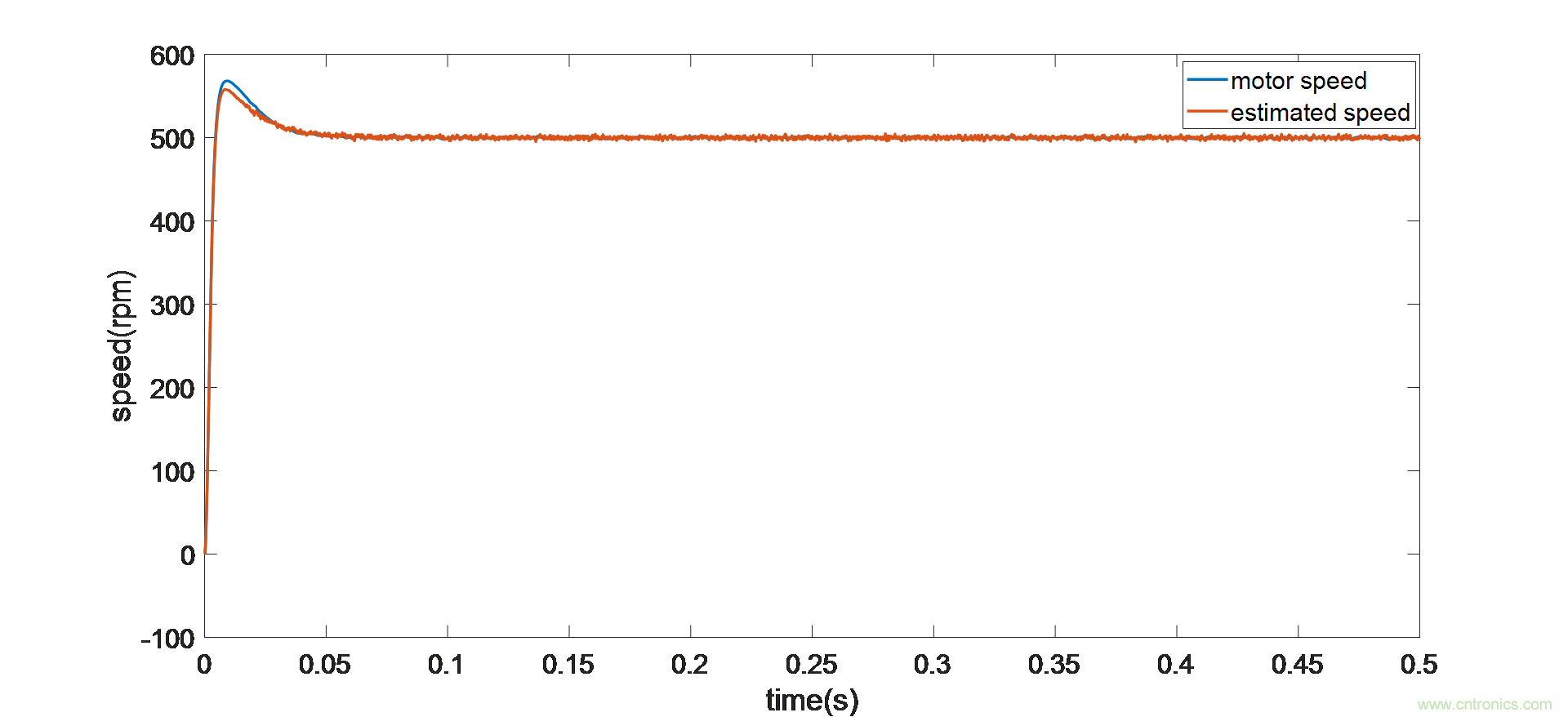
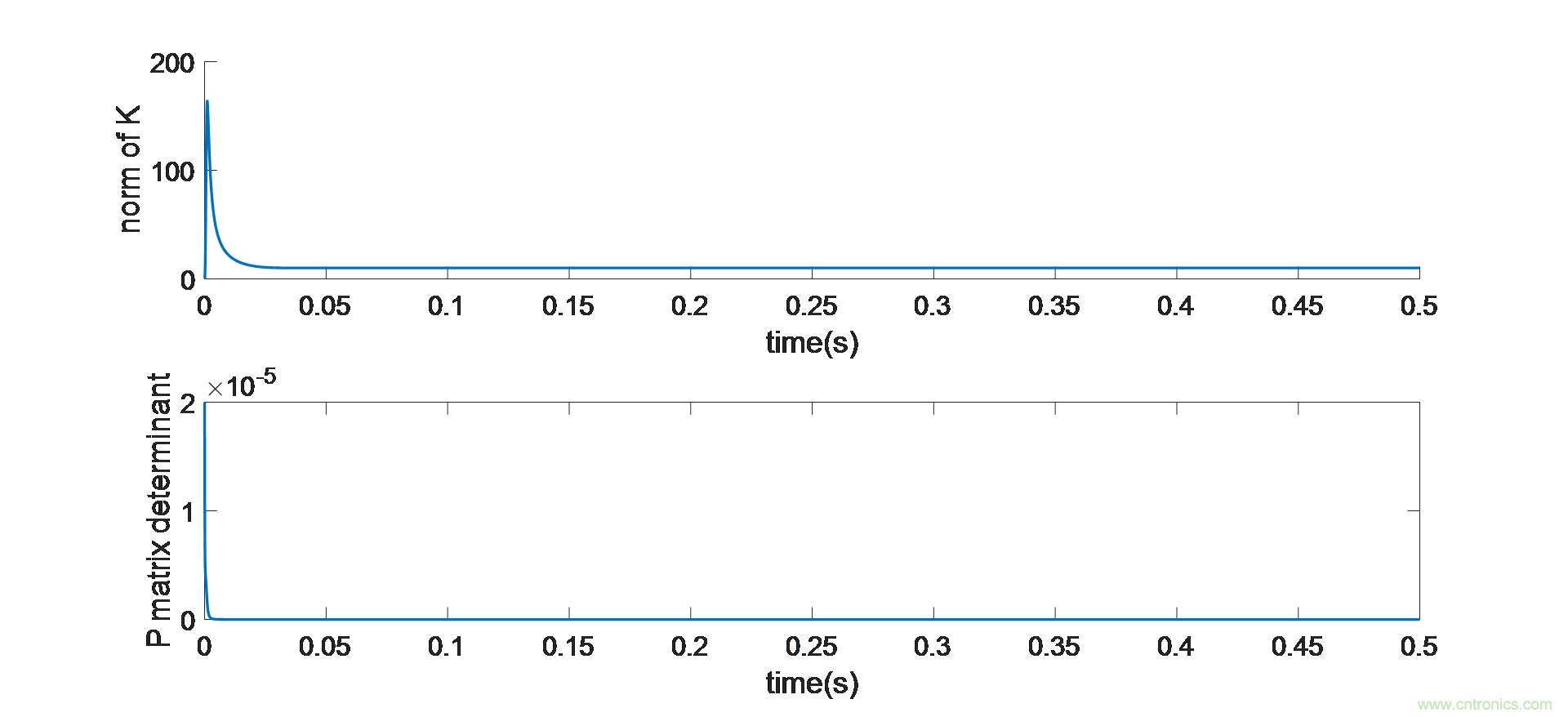

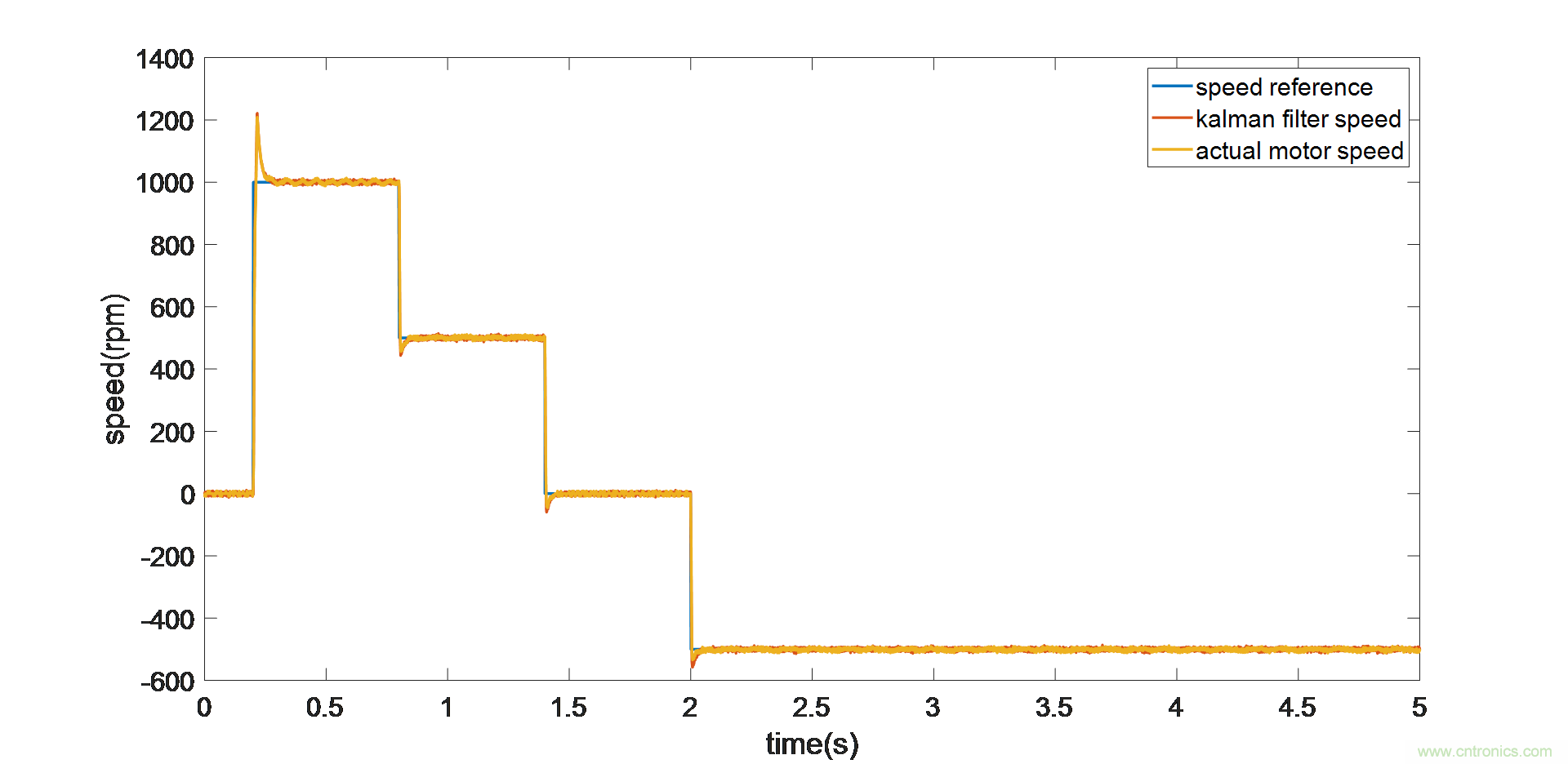
圖 3:速度響應(yīng)
圖4:誤差方差和觀測器增益動力學(xué)
實時硬件實驗結(jié)果
為了驗證算法,還測量了實時硬件實驗結(jié)果。電機(jī)控制模塊專為NEMA 23 57mm電機(jī)設(shè)計,可直接安裝在電機(jī)上。
圖5:MPS電機(jī)控制模塊(左)和MPS智能電機(jī)(右)
如上一節(jié)所述,將MA702角度傳感器采樣的角度反饋到電機(jī)控制ASIC的絕對轉(zhuǎn)子位置,使得動態(tài)觀測器的遞歸迭代實現(xiàn)更加容易,并且減少了計算負(fù)擔(dān)。由于測量只是一個變量,而不是經(jīng)過復(fù)雜的矩陣變換,觀測器增益計算變得更簡單。每次迭代,整個動態(tài)觀測器計算的時間不到20μs。
圖6:實時的步進(jìn)速度響應(yīng)
圖6顯示了從1000rpm到-500rpm的各種速度參考值通過步進(jìn)變化輸入到仿真系統(tǒng)。動態(tài)觀測器估計的速度仍然可以跟蹤面對不同速度參考步驟的電動機(jī)速度。該算法還可以提供靜止參考。
結(jié)論
本文為PMSM FOC提供了一種很有前景的解決方案,它將低成本的磁性角度傳感器和動態(tài)觀測器結(jié)合起來,以估算出準(zhǔn)確的轉(zhuǎn)子速度。該算法使用在MPS的電機(jī)控制ASIC中。MA702提供高分辨率的板上角度傳感器,因此該算法避免了高維矩陣逆計算,這大大簡化了代碼開發(fā)和計算的時間。仿真和實時驗證結(jié)果均表明所提出的解決方案具有良好的動態(tài)性能,并且能夠在給定不同速度參考的情況下控制PMSM。
推薦閱讀:



