
【導(dǎo)讀】串口通信(SerialCommunicaTIons)的概念非常簡單,串口按位(bit)發(fā)送和接收字節(jié)。盡管比按字節(jié)(byte)的并行通信慢,但是串口可以在使用一根線發(fā)送數(shù)據(jù)的同時用另一根線接收數(shù)據(jù)。它很簡單并且能夠?qū)崿F(xiàn)遠(yuǎn)距離通信。
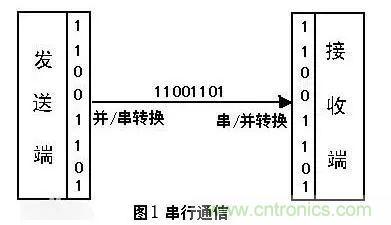
串口通信的原理
串口通信(SerialCommunicaTIons)的概念非常簡單,串口按位(bit)發(fā)送和接收字節(jié)。盡管比按字節(jié)(byte)的并行通信慢,但是串口可以在使用一根線發(fā)送數(shù)據(jù)的同時用另一根線接收數(shù)據(jù)。它很簡單并且能夠?qū)崿F(xiàn)遠(yuǎn)距離通信。比如IEEE488定義并行通行狀態(tài)時,規(guī)定設(shè)備線總長不得超過20米,并且任意兩個設(shè)備間的長度不得超過2米;而對于串口而言,長度可達(dá)1200米。典型地,串口用于ASCII碼字符的傳輸。通信使用3根線完成,分別是地線、發(fā)送、接收。由于串口通信是異步的,端口能夠在一根線上發(fā)送數(shù)據(jù)同時在另一根線上接收數(shù)據(jù)。其他線用于握手,但不是必須的。串口通信最重要的參數(shù)是波特率、數(shù)據(jù)位、停止位和奇偶校驗。對于兩個進(jìn)行通信的端口,這些參數(shù)必須匹配。
a,波特率:這是一個衡量符號傳輸速率的參數(shù)。指的是信號被調(diào)制以后在單位時間內(nèi)的變化,即單位時間內(nèi)載波參數(shù)變化的次數(shù),如每秒鐘傳送240個字符,而每個字符格式包含10位(1個起始位,1個停止位,8個數(shù)據(jù)位),這時的波特率為240Bd,比特率為10位*240個/秒=2400bps。一般調(diào)制速率大于波特率,比如曼徹斯特編碼)。通常電話線的波特率為14400,28800和36600。波特率可以遠(yuǎn)遠(yuǎn)大于這些值,但是波特率和距離成反比。高波特率常常用于放置的很近的儀器間的通信,典型的例子就是GPIB設(shè)備的通信。
b,數(shù)據(jù)位:這是衡量通信中實際數(shù)據(jù)位的參數(shù)。當(dāng)計算機(jī)發(fā)送一個信息包,實際的數(shù)據(jù)往往不會是8位的,標(biāo)準(zhǔn)的值是6、7和8位。如何設(shè)置取決于你想傳送的信息。比如,標(biāo)準(zhǔn)的ASCII碼是0~127(7位)。擴(kuò)展的ASCII碼是0~255(8位)。如果數(shù)據(jù)使用簡單的文本(標(biāo)準(zhǔn)ASCII碼),那么每個數(shù)據(jù)包使用7位數(shù)據(jù)。每個包是指一個字節(jié),包括開始/停止位,數(shù)據(jù)位和奇偶校驗位。由于實際數(shù)據(jù)位取決于通信協(xié)議的選取,術(shù)語“包”指任何通信的情況。
c,停止位:用于表示單個包的最后一位。典型的值為1,1.5和2位。由于數(shù)據(jù)是在傳輸線上定時的,并且每一個設(shè)備有其自己的時鐘,很可能在通信中兩臺設(shè)備間出現(xiàn)了小小的不同步。因此停止位不僅僅是表示傳輸?shù)慕Y(jié)束,并且提供計算機(jī)校正時鐘同步的機(jī)會。適用于停止位的位數(shù)越多,不同時鐘同步的容忍程度越大,但是數(shù)據(jù)傳輸率同時也越慢。
d,奇偶校驗位:在串口通信中一種簡單的檢錯方式。有四種檢錯方式:偶、奇、高和低。當(dāng)然沒有校驗位也是可以的。對于偶和奇校驗的情況,串口會設(shè)置校驗位(數(shù)據(jù)位后面的一位),用一個值確保傳輸?shù)臄?shù)據(jù)有偶個或者奇?zhèn)€邏輯高位。例如,如果數(shù)據(jù)是011,那么對于偶校驗,校驗位為0,保證邏輯高的位數(shù)是偶數(shù)個。如果是奇校驗,校驗位為1,這樣就有3個邏輯高位。高位和低位不真正的檢查數(shù)據(jù),簡單置位邏輯高或者邏輯低校驗。這樣使得接收設(shè)備能夠知道一個位的狀態(tài),有機(jī)會判斷是否有噪聲干擾了通信或者是否傳輸和接收數(shù)據(jù)是否不同步。
RS232概述
在我們電腦上,一般都會有一個9針的串行接口,這個串行接口叫做RS232接口,它和UART通信有關(guān)聯(lián),但是由于現(xiàn)在筆記本電腦不帶9針串口,所以和單片機(jī)通信越來越趨于使用USB虛擬串口。
九針串口分工頭和母頭
公頭上5下4,上5從左到右為1.2.3.4.5;下4從左到右為6.7.8.9;
母頭上5下4,上5從左到右為5.4.3.2.1;下4從左到右為9.8.7.6;
RS232接口一共有9個引腳,分別定義是:1、載波檢測DCD;2、接收數(shù)據(jù)RXD;3、發(fā)送數(shù)據(jù)TXD;4、數(shù)據(jù)終端準(zhǔn)備好DTR;5、信號地線SG;6、數(shù)據(jù)準(zhǔn)備好DSR;7、請求發(fā)送RTS;8、清除發(fā)送CTS;9、振鈴提示RI。我們要讓這個串口和我們單片機(jī)進(jìn)行通信,我們只需要關(guān)心其中的2腳RXD、3腳TXD和5腳GND即可
雖然這三個引腳的名字和我們單片機(jī)上的串口名字一樣,但是卻不能直接和單片機(jī)對連通信,這是為什么呢?隨著我們了解的內(nèi)容越來越多,我們得慢慢知道,不是所有的電路都是5V代表高電平而0V代表低電平的。對于RS232標(biāo)準(zhǔn)來說,它是個反邏輯,也叫做負(fù)邏輯。為何叫負(fù)邏輯?它的TXD和RXD的電壓,-3V~-15V電壓代表是1,+3~+15V電壓代表是0。低電平代表的是1,而高電平代表的是0,所以稱之為負(fù)邏輯。因此電腦的9針RS232串口是不能和單片機(jī)直接連接的,需要用一個電平轉(zhuǎn)換芯片MAX232來完成
這個芯片就可以實現(xiàn)把標(biāo)準(zhǔn)RS232串口電平轉(zhuǎn)換成我們單片機(jī)能夠識別和承受的UART0V/5V電平。從這里大家似乎慢慢有點明白了,其實RS232串口和UART串口,它們的協(xié)議類型是一樣的,只是電平標(biāo)準(zhǔn)不同而已,而MAX232這個芯片起到的就是中間人的作用,它把UART電平轉(zhuǎn)換成RS232電平,也把RS232電平轉(zhuǎn)換成UART電平,從而實現(xiàn)標(biāo)準(zhǔn)RS232接口和單片機(jī)UART之間的通信連接。

USB轉(zhuǎn)串口通信
隨著技術(shù)的發(fā)展,工業(yè)上還有RS232串口通信的大量使用,但是商業(yè)技術(shù)的應(yīng)用上,已經(jīng)慢慢的使用USB轉(zhuǎn)UART技術(shù)取代了RS232串口,絕大多數(shù)筆記本電腦已經(jīng)沒有串口這個東西了,那我們要實現(xiàn)單片機(jī)和電腦之間的通信該怎么辦呢?
們只需要在電路上添加一個USB轉(zhuǎn)串口芯片,就可以成功實現(xiàn)USB通信協(xié)議和標(biāo)準(zhǔn)UART串行通信協(xié)議的轉(zhuǎn)換,在我們的開發(fā)板上,我們使用的是CH340T這個芯片
我們需要用跳線帽把中間和下邊的針短接在一起。右側(cè)的CH340T這個電路很簡單,把電源、晶振接好后,6腳和7腳的DP和DM分別接USB口的2個數(shù)據(jù)引腳上去,3腳和4腳通過跳線接到了我們單片機(jī)的TXD和RXD上去。
CH340T的電路里3腳位置加了個4148的二極管,是一個小技巧。因為STC89C52這個單片機(jī)下載程序時需要冷啟動,就是先點下載后上電,上電瞬間單片機(jī)會先檢測需要不需要下載程序。雖然單片機(jī)的VCC是由開關(guān)來控制,但是由于CH340T的3腳是輸出引腳,如果沒有此二極管,開關(guān)后級單片機(jī)在斷電的情況下,CH340T的3腳和單片機(jī)的P3.0(即RXD)引腳連在一起,有電流會通過這個引腳流入后級電路并且給后級的電容充電,造成后級有一定幅度的電壓,這個電壓值雖然只有兩三伏左右,但是可能會影響到正常的冷啟動。加了二極管后,一方面不影響通信,另外一個方面還可以消除這種不良影響。這個地方可以暫時作為了解,大家如果自己做這類電路,可以參考一下。
IO口模擬UART串口通信
UART串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200等速率。IO口模擬UART串行通信程序是一個簡單的演示程序,我們使用串口調(diào)試助手下發(fā)一個數(shù)據(jù),數(shù)據(jù)加1后,再自動返回。
串口調(diào)試助手,這里我們直接使用STC-ISP軟件自帶的串口調(diào)試助手,先把串口調(diào)試助手的使用給大家說一下,如圖11-6所示。第一步要選擇串口助手菜單,第二步選擇十六進(jìn)制顯示,第三步選擇十六進(jìn)制發(fā)送,第四步選擇COM口,這個COM口要和自己電腦設(shè)備管理器里的那個COM口一致,波特率按我們程序設(shè)定好的選擇,我們程序中讓一個數(shù)據(jù)位持續(xù)時間是1/9600秒,那這個地方選擇波特率就是選9600,校驗位選N,數(shù)據(jù)位8,停止位1。
串口調(diào)試助手的實質(zhì)就是利用電腦上的UART通信接口,發(fā)送數(shù)據(jù)給我們的單片機(jī),也可以把我們的單片機(jī)發(fā)送的數(shù)據(jù)接收到這個調(diào)試助手界面上。
因為初次接觸通信方面的技術(shù),所以我把后面的IO模擬串口通信程序進(jìn)行一下解釋,大家可以邊看我的解釋邊看程序,把底層原理先徹底弄懂。
變量定義部分就不用說了,直接看main主函數(shù)。首先是對通信的波特率的設(shè)定,在這里我們配置的波特率是9600,那么串口調(diào)試助手也得是9600。配置波特率的時候,我們用的是定時器T0的模式2。模式2中,不再是TH0代表高8位,TL0代表低8位了,而只有TL0在進(jìn)行計數(shù),當(dāng)TL0溢出后,不僅僅會讓TF0變1,而且還會將TH0中的內(nèi)容重新自動裝到TL0中。這樣有一個好處,就是我們可以把想要的定時器初值提前存在TH0中,當(dāng)TL0溢出后,TH0自動把初值就重新送入TL0了,全自動的,不需要程序中再給TL0重新賦值了,配置方式很簡單,大家可以自己看下程序并且計算一下初值。
波特率設(shè)置好以后,打開中斷,然后等待接收串口調(diào)試助手下發(fā)的數(shù)據(jù)。接收數(shù)據(jù)的時候,首先要進(jìn)行低電平檢測while(PIN_RXD),若沒有低電平則說明沒有數(shù)據(jù),一旦檢測到低電平,就進(jìn)入啟動接收函數(shù)StartRXD()。接收函數(shù)最開始啟動半個波特率周期,初學(xué)可能這里不是很明白。大家回頭看一下我們的圖11-2里邊的串口數(shù)據(jù)示意圖,如果在數(shù)據(jù)位電平變化的時候去讀取,因為時序上的誤差以及信號穩(wěn)定性的問題很容易讀錯數(shù)據(jù),所以我們希望在信號最穩(wěn)定的時候去讀數(shù)據(jù)。除了信號變化的那個沿的位置外,其它位置都很穩(wěn)定,那么我們現(xiàn)在就約定在信號中間位置去讀取電平狀態(tài),這樣能夠保證我們讀的一定是正確的。
一旦讀到了起始信號,我們就把當(dāng)前狀態(tài)設(shè)定成接收狀態(tài),并且打開定時器中斷,第一次是半個周期進(jìn)入中斷后,對起始位進(jìn)行二次判斷一下,確認(rèn)一下起始位是低電平,而不是一個干擾信號。以后每經(jīng)過1/9600秒進(jìn)入一次中斷,并且把這個引腳的狀態(tài)讀到RxdBuf里邊。等待接收完畢之后,我們再把這個RxdBuf加1,再通過TXD引腳發(fā)送出去,同樣需要先發(fā)一位起始位,然后發(fā)8個數(shù)據(jù)位,再發(fā)結(jié)束位,發(fā)送完畢后,程序運行到while(PIN_RXD),等待第二輪信號接收的開始。
uart模塊介紹
IO口模擬串口通信,讓大家了解了串口通信的本質(zhì),但是我們的單片機(jī)程序卻需要不停的檢測掃描單片機(jī)IO口收到的數(shù)據(jù),大量占用了單片機(jī)的運行時間。這時候就會有聰明人想了,其實我們并不是很關(guān)心通信的過程,我們只需要一個通信的結(jié)果,最終得到接收到的數(shù)據(jù)就行了。這樣我們可以在單片機(jī)內(nèi)部做一個硬件模塊,讓它自動接收數(shù)據(jù),接收完了,通知我們一下就可以了,我們的51單片機(jī)內(nèi)部就存在這樣一個UART模塊,要正確使用它,當(dāng)然還得先把對應(yīng)的特殊功能寄存器配置好。
51單片機(jī)的UART串口的結(jié)構(gòu)由串行口控制寄存器SCON、發(fā)送和接收電路三部分構(gòu)成,先來了解一下串口控制寄存器SCON。
SCON串行控制器的位分配(地址:0x98)
位:符號:復(fù)位值: 0:RI:0;1:TI:0;2:RB8:0;3:TB8:0;4:REN:0;5:SM2:0;6:SM1:0;7:SM0:0;
0位RI:接收中斷標(biāo)志位,當(dāng)接收電路接收到停止位的中間位置時,RI由硬件置1,必須通過軟件清零
1位TI:發(fā)送中斷標(biāo)志位,當(dāng)發(fā)送電路發(fā)送到停止位的中間位置時,TI由硬件置1,必須通過軟件清零。
2位RB8:模式2和3中接收到的第9位數(shù)據(jù)(很少用),模式1用來接收停止位。
3位TB8:模式2和3中要發(fā)送的第9位數(shù)據(jù)(很少用)。
4位REN:使能串行接收。由軟件置位使能接收,軟件清零則禁止接收。
5位SM2:多機(jī)通信控制位(極少用),模式1直接清零。
6位SM1和7位SM0:
這兩位共同決定了串口通信的模式0~模式3共4種模式。我們最常用的就是模式1,也就是SM0=0,SM1=1,下邊我們重點就講模式1,其它模式從略。
對于串口的四種模式,模式1是最常用的,就是我們前邊提到的1位起始位,8位數(shù)據(jù)位和1位停止位。下面我們就詳細(xì)介紹模式1的工作細(xì)節(jié)和使用方法,至于其它3種模式與此也是大同小異,真正遇到需要使用的時候大家再去查閱相關(guān)資料就行了。
在我們使用IO口模擬串口通信的時候,串口的波特率是使用定時器T0的中斷體現(xiàn)出來的。在硬件串口模塊中,有一個專門的波特率發(fā)生器用來控制發(fā)送和接收數(shù)據(jù)的速度。對于STC89C52單片機(jī)來講,這個波特率發(fā)生器只能由定時器T1或定時器T2產(chǎn)生,而不能由定時器T0產(chǎn)生,這和我們模擬的通信是完全不同的概念。
如果用定時器2,需要配置額外的寄存器,默認(rèn)是使用定時器1的,我們本章內(nèi)容主要就使用定時器T1作為波特率發(fā)生器來講解,方式1下的波特率發(fā)生器必須使用定時器T1的模式2,也就是自動重裝載模式,定時器的重載值計算公式為:
TH1 = TL1 = 256 - 晶振值/12 /2/16 /波特率
和波特率有關(guān)的還有一個寄存器,是一個電源管理寄存器PCON,他的最高位可以把波特率提高一倍,也就是如果寫PCON |= 0x80以后,計算公式就成了:
TH1 = TL1 = 256 - 晶振值/12 /16 /波特率
公式中數(shù)字的含義這里解釋一下,256是8位定時器的溢出值,也就是TL1的溢出值,晶振值在我們的開發(fā)板上就是11059200,12是說1個機(jī)器周期等于12個時鐘周期,值得關(guān)注的是這個16,我們來重點說明。在IO口模擬串口通信接收數(shù)據(jù)的時候,采集的是這一位數(shù)據(jù)的中間位置,而實際上串口模塊比我們模擬的要復(fù)雜和精確一些。他采取的方式是把一位信號采集16次,其中第7、8、9次取出來,這三次中其中兩次如果是高電平,那么就認(rèn)定這一位數(shù)據(jù)是1,如果兩次是低電平,那么就認(rèn)定這一位是0,這樣一旦受到意外干擾讀錯一次數(shù)據(jù),也依然可以保證最終數(shù)據(jù)的正確性。
串口通信的發(fā)送和接收電路在物理上有2個名字相同的SBUF寄存器,它們的地址也都是0x99,但是一個用來做發(fā)送緩沖,一個用來做接收緩沖。意思就是說,有2個房間,兩個房間的門牌號是一樣的,其中一個只出人不進(jìn)人,另外一個只進(jìn)人不出人,這樣的話,我們就可以實現(xiàn)UART的全雙工通信,相互之間不會產(chǎn)生干擾。但是在邏輯上呢,我們每次只操作SBUF,單片機(jī)會自動根據(jù)對它執(zhí)行的是“讀”還是“寫”操作來選擇是接收SBUF還是發(fā)送SBUF,后邊通過程序,我們就會徹底了解這個問題。
UART串口程序:
一般情況下,我們編寫串口通信程序的基本步驟如下所示:
1、配置串口為模式1。
2、配置定時器T1為模式2,即自動重裝模式。
3、根據(jù)波特率計算TH1和TL1的初值,如果有需要可以使用PCON進(jìn)行波特率加倍。
4、打開定時器控制寄存器TR1,讓定時器跑起來。
這里還要特別注意一下,就是在使用T1做波特率發(fā)生器的時候,千萬不要再使能T1的中斷了。
我們先來看一下由IO口模擬串口通信直接改為使用硬件UART模塊時的程序代碼,看看程序是不是簡單了很多,因為大部分的工作硬件模塊都替我們做了。程序功能和IO口模擬的是完全一樣的。

通信實例與ASCLL碼
先拋開我們使用的漢字不談,那么我們常用的字符就包含了0~9的數(shù)字、A~Z/a~z的字母、還有各種標(biāo)點符號等。那么在單片機(jī)系統(tǒng)里面我們怎么來表示它們呢?ASCII碼(AmericanStandardCodeforInformationInterchange,即美國信息互換標(biāo)準(zhǔn)代碼)可以完成這個使命:我們知道,在單片機(jī)中一個字節(jié)的數(shù)據(jù)可以有0~255共256個值,我們?nèi)∑渲械?~127共128個值賦予了它另外一層涵義
我們用字符格式發(fā)送一個小寫的a,返回一個十六進(jìn)制的0x61,數(shù)碼管上顯示的也是61,ASCII碼表里字符a對應(yīng)十進(jìn)制是97,等于十六進(jìn)制的0x61;我們再用字符格式發(fā)送一個數(shù)字1,返回一個十六進(jìn)制的0x31,數(shù)碼管上顯示的也是31,ASCII表里字符1對應(yīng)的十進(jìn)制是49,等于十六進(jìn)制的0x31。這下大家就該清楚了:所謂的十六進(jìn)制發(fā)送和十六進(jìn)制接收,都是按字節(jié)數(shù)據(jù)的真實值進(jìn)行的;而字符格式發(fā)送和字符格式接收,是按ASCII碼表中字符形式進(jìn)行的,但它實際上最終傳輸?shù)倪€是一個字節(jié)數(shù)據(jù)。這個表格,當(dāng)然不需要大家去記住,理解它,用的時候過來查就行了。
51單片機(jī)串口通信實例(字符串接收和發(fā)送)
#include《reg52.h》
//------------------串口通信協(xié)議-----------------//
/*
客戶端數(shù)據(jù)包格式解釋(長度恒為15):
例如:A01_fmq_01Off___#
A--------數(shù)據(jù)包的開始標(biāo)記(可以為A到Z,意味著數(shù)據(jù)包可以有26種)
01-----設(shè)備代號
fmq_01Off___--------指令(長度恒為10),指令的前4個人字符是指令頭部,指令的后6個字符是指令尾部
#---------數(shù)據(jù)包的結(jié)束標(biāo)記
服務(wù)器端數(shù)據(jù)包格式解釋(長度恒為15):
例如:A02_SenT010250#
A--------數(shù)據(jù)包的開始標(biāo)記(可以為A到Z,意味著數(shù)據(jù)包可以有26種)
02-----設(shè)備代號
SenT010250--------指令(長度恒為10),指令的前4個人字符是指令頭部,指令的后6個字符是指令尾部
#---------數(shù)據(jù)包的結(jié)束標(biāo)記
*/
char buf_string[16]; //定義數(shù)據(jù)包長度為15個字符
#define deviceID_1Bit ‘0’ //用于串口通信時,定義本地設(shè)備ID的第1位
#define deviceID_2Bit ‘2’ //用于串口通信時,定義本地設(shè)備ID的第2位
#define datapackage_headflag ‘A’ //用于串口通信時,定義數(shù)據(jù)包頭部的驗證標(biāo)記
char DataPackage_DS18B20[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,‘_’,‘S’,‘e’,‘n’,‘T’,‘X’,‘X’,‘X’,‘X’,‘X’,‘X’,‘#’};
char HeartBeat[16]={datapackage_headflag,deviceID_1Bit,deviceID_2Bit,‘_’,‘B’,‘e’,‘a’,‘t’,‘X’,‘X’,‘X’,‘X’,‘X’,‘X’,‘#’};
//----------------------------------------------//
/*******************************
串口通信
MCU:89C52RC 11.0592MHz
//11.0592MHz 0xd0 1200bps
//12MHz 0xcc 1200bps
//11.0592MHz 0xfa 9600bps
//0xf4 11.0592MHz 0xf3 12MHz 4800bps
//均在SMOD=1的情況下(波特率倍增模式)
*******************************/
//串口發(fā)送函數(shù)
void PutString(unsigned char *TXStr)
{
ES=0;
while(*TXStr!=0)
{
SBUF=*TXStr;
while(TI==0);
TI=0;
TXStr++;
}
ES=1;
}
//串口接收函數(shù)
bit ReceiveString()
{
char * RecStr=buf_string;
char num=0;
unsigned char count=0;
loop:
*RecStr=SBUF;
count=0;
RI=0;
if(num《14) //數(shù)據(jù)包長度為15個字符,嘗試連續(xù)接收15個字符
{
num++;
RecStr++;
while(!RI)
{
count++;
if(count》130)return 0; //接收數(shù)據(jù)等待延遲,等待時間太久會導(dǎo)致CPU運算閑置,太短會出現(xiàn)“數(shù)據(jù)包被分割”,默認(rèn)count=130
}
goto loop;
}
return 1;
}
//定時器1用作波特率發(fā)生器
void Init_USART()
{
SCON=0x50; //串口方式1,使能接收
TMOD|=0x20; //定時器1工作方式2(8位自動重裝初值)
TMOD&=~0x10;
TH1=0xfa; //9600bps
TL1=0xfa;
PCON|=0x80; //SMOD=1
TR1=1;
TI=0;
RI=0;
//PS=1; //提高串口中斷優(yōu)先級
ES=1; //開啟串口中斷使能
}
//比較指令頭部
bit CompareCMD_head(char CMD_head[])
{
unsigned char CharNum;
for(CharNum=0;CharNum《4;CharNum++) //指令長度為10個字符
{
if(?。╞uf_string[CharNum+4]==CMD_head[CharNum]))
{
return 0; //指令頭部匹配失敗
}
}
return 1; //指令頭部匹配成功
}
//比較指令尾部(start:從哪里開始比較,quality:比較多少個字符,CMD_tail[]:要比較的字符串)
bit CompareCMD_tail(unsigned char start,unsigned char quality,char CMD_tail[])
{
unsigned char CharNum;
for(CharNum=0;CharNum《quality;CharNum++)
{
if(?。╞uf_string[start+CharNum]==CMD_tail[CharNum]))
{
return 0;
}
}
return 1;
}
bit Deal_UART_RecData() //處理串口接收數(shù)據(jù)包函數(shù)(成功處理數(shù)據(jù)包則返回1,否則返回0)
{
//PutString(buf_string);
if(buf_string[0]==datapackage_headflag&&buf_string[14]==‘#’) //進(jìn)行數(shù)據(jù)包頭尾標(biāo)記驗證
{
switch(buf_string[1]) //識別發(fā)送者設(shè)備ID的第1位數(shù)字
{
case ‘0’:
switch(buf_string[2]) //識別發(fā)送者設(shè)備ID的第2位數(shù)字
{
case ‘3’:
if(CompareCMD_head(“Ligt”)) //判斷指令頭部是否為“Ligt”
{
//下面是指令尾部分析
switch(buf_string[8])
{
case ‘0’:
switch(buf_string[9])
{
case ‘0’:
return 0;
case ‘1’:
if(CompareCMD_tail(10,3,“Off”)) //A03_Ligt01Off_#
{
//要執(zhí)行的代碼
return 1;
}
if(CompareCMD_tail(10,3,“On_”))
{
return 1;
}
return 0;
default:
return 0;
}
case ‘1’:
default:
return 0;
}
}
if(CompareCMD_head(“SenT”))
{
}
if(CompareCMD_head(“jdq_”))
{
}
if(CompareCMD_head(“Try!”))
{
}
return 0;
default:
return 0;
}
default:
return 0;
}
}
return 0;
}
/************************
中斷函數(shù)
************************/
//串口中斷服務(wù)函數(shù)-----------
void USART() interrupt 4 //標(biāo)志位TI和RI需要手動復(fù)位,TI和RI置位共用一個中斷入口
{
if(ReceiveString())
{
//數(shù)據(jù)包長度正確則執(zhí)行以下代碼
Deal_UART_RecData();
}
else
{
//數(shù)據(jù)包長度錯誤則執(zhí)行以下代碼
//LED1=~LED1;
}
RI=0; //接收并處理一次數(shù)據(jù)后把接收中斷標(biāo)志清除一下,拒絕響應(yīng)在中斷接收忙的時候發(fā)來的請求
}
/***************************
主函數(shù)
***************************/
void main()
{
EA=1;
Init_USART();
while(1)
{
//PutString(buf_string);//空格20H,回車0DH
}
}



