

【導讀】在智能駕駛傳感器領(lǐng)域,和激光雷達(LiDAR)相比,毫米波雷達(Millimeter-Wave Radar)更接地氣,在技術(shù)上已非常成熟,而且其市場出貨量相當可觀,以中國市場為例,2015年車載毫米波雷達銷量為180萬顆,大概平均每12臺車搭載1顆毫米波雷達。此外,毫米波雷達在歐洲的普及率非常高。

杭州智波科技便是這個領(lǐng)域的玩家之一。公司成立于2015年底,在車載雷達領(lǐng)域,杭州智波已經(jīng)研發(fā)出產(chǎn)品ZB002V,這是一款基于毫米波技術(shù)的K波段通用雷達,適用于汽車前向碰撞警告、大型無人機避障、大型物流機器人等對精確測速、測距有需求的場合。
在近日嘉之道汽車舉辦的一場ADAS相關(guān)論壇上,杭州智波創(chuàng)始人兼董事長袁帥以“車載毫米波雷達技術(shù)和智能駕駛應用”為主題進行了分享,詳述了毫米波雷達的頻段、發(fā)展史、基本原理、關(guān)鍵技術(shù)以及市場預期。雷鋒網(wǎng)新智駕(AI-Drive)進行了精編:
一、毫米波頻段的劃分
毫米波實質(zhì)上就是電磁波。毫米波的頻段比較特殊,其頻率高于無線電,低于可見光和紅外線,頻率大致范圍是10GHz—200GHz。毫米波介于微波(Micro waves)和THz(1000GHz)之間,可以說是微波的一個子集。
在這個頻段,毫米波相關(guān)的特性使其非常適合應用于車載領(lǐng)域。目前,比較常見的車載領(lǐng)域的毫米波雷達頻段有三類。
其一是24—24.25GHz這個頻段,目前大量應用于汽車的盲點監(jiān)測、變道輔助。雷達安裝在車輛的后保險杠內(nèi),用于監(jiān)測車輛后方兩側(cè)的車道是否有車、可否進行變道。這個頻段也有其缺點,首先是頻率比較低,另外就是帶寬(Bandwidth)比較窄,只有250MHz。
另一個頻段就是77GHz,這個頻段的頻率比較高,國際上允許的帶寬高達800MHz。據(jù)袁帥介紹,這個頻段的雷達性能要好于24GHz的雷達,所以主要用來裝配在車輛的前保險杠上,探測與前車的距離以及前車的速度,實現(xiàn)的主要是緊急制動、自動跟車等主動安全領(lǐng)域的功能。
第三類應用頻段就是79GHz—81GHz,這個頻段最大的特點就是其帶寬非常寬,要比77GHz的高出3倍以上,這也使其具備非常高的分辨率(雷鋒網(wǎng)新智駕注:后文會對“分辨率”有詳細闡釋),可以達到5cm。這個分辨率在自動駕駛領(lǐng)域非常有價值,因為自動駕駛汽車要區(qū)分行人等諸多精細物體,對帶寬的要求很高。袁帥表示,這個頻段在未來的自動駕駛領(lǐng)域會有很廣泛的應用。
而在波長方面,24GHz毫米波的波長是1.25cm,而77GHz毫米波的波長大概是4mm,毫米波的波長要比光波的波長長1000倍以上,所以它對物體的穿透能力更強。
舉個例子,我們通??吹降幕覊m的直徑大概在1um—100um之間,自然界的雨點的直徑在0.5mm—4mm的范圍內(nèi)。所以波長與它們相等或者更長的電磁波可以輕易穿透這些障礙物,毫米波便擁有這樣的能力。
這種可靠性是其他任何傳感器難以達成的,所以在ADAS這樣一個對安全性、可靠性要求比較高的領(lǐng)域,毫米波雷達擁有很難撼動的地位。
二、毫米波雷達在車載領(lǐng)域的發(fā)展史
實際上,在上世紀60年代的美國,毫米波雷達便開始在車載領(lǐng)域應用,但是當時的工藝水平較低,應用的是單天線,前端只能一收一發(fā),其頻率只有10GHz。而且,在袁帥的描述中,這種雷達裝置配備在車輛的前方并不美觀,“基本上就像是兩個盤子在那放著。”
之后,為了縮小其體積,業(yè)內(nèi)專家不斷將頻率往上提,來到30GHz、50GHz。雷達頻率越高、天線尺寸就越小,意味著同樣尺寸的雷達,其天線波束的集中度更高。
到了90年代,就發(fā)展出了60GHz、77GHz和94GHz的毫米波雷達。60GHz頻段后來主要用來通信,94GHz主要是軍用頻段,而工業(yè)上則選擇了77GHz作為主流的毫米波雷達的頻段。
在歷史上,也有比較典型的毫米波雷達應用。1992年,美國交通部門在灰狗公交車上安裝了1500套毫米波雷達,到1993年取得了立竿見影的效果:交通事故發(fā)生率下降了25%。不過最后因為效果太好,損壞了一些既得利益者的利益,所以在1994年被全部拆除。
時至今日,全球主要有四大毫米波雷達供應商(雷鋒網(wǎng)新智駕注:當然它們的業(yè)務也不僅限于毫米波雷達),簡稱為ABCD,即Autoliv、Bosch、Continental和Delphi。
Autoliv以24GHz盲點、變道輔助雷達為主,主要客戶是戴姆勒奔馳——其車輛基本標配了變道輔助,Autoliv的毫米波雷達出貨量很大。
Bosch的毫米波雷達主要以77GHz為主,覆蓋的面比較廣,有長距(LRR)、中距(MRR)以及用于車后方的盲點雷達。Bosch的方案集成度非常高,輸出的是對汽車的控制信號,其定制性很強,通常是與大型車企合作一個車型,共同推進項目。
Continental在毫米波雷達產(chǎn)品方面既有24GHz,也有77GHz,性能做得還不錯,戴姆勒的77GHz毫米波雷達主要由Continental供應。
Delphi則是美國老牌企業(yè),以77GHz毫米波雷達為主,采用較為傳統(tǒng)的硬件方案,成本比較高,性能不俗。
三、毫米波雷達對距離、速度和角度的探測
需要明確的一點是,毫米波雷達在測量目標的距離、速度和角度上展現(xiàn)的性能和其他傳感器還是略有區(qū)別的。視覺傳感器得到的是二維信息,沒有深度信息,而毫米波雷達則是具備深度信息的,可以提供目標的距離;激光雷達對于速度并不敏感,而毫米波雷達則對速度非常敏感,可以直接獲得目標的速度,因為毫米波雷達會有很明顯的多普勒效應,通過檢測其多普勒頻移可將目標的速度提取出來。
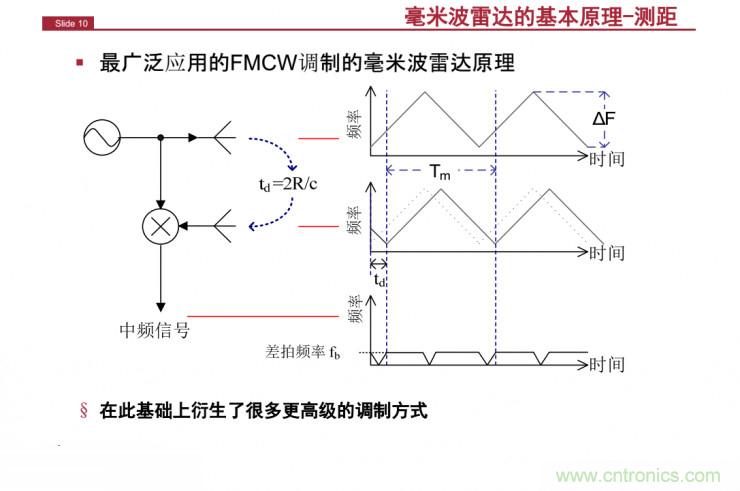
毫米波雷達最基本的探測技術(shù)是使用FMCW連續(xù)線性調(diào)頻波去探測前方物體的距離,毫米波雷達發(fā)射的是連續(xù)波,在后端處理上要比激光雷達的運算量大。
其原理在于:
振蕩器會產(chǎn)生一個頻率隨時間逐漸增加的信號,這個信號遇到障礙物之后,會反彈回來,其時延是2倍距離/光速。返回來的波形和發(fā)出的波形之間有個頻率差,這個頻率差和時延是呈線性關(guān)系的:物體越遠,返回的波收到的時間就越晚,那么它跟入射波的頻率差值就越大。
將這兩個頻率做一個減法,就可以得到二者頻率的差頻(差拍頻率),通過判斷差拍頻率的高低就可以判斷障礙物的距離。
此外,為了探測目標的速度,也有更為高級的調(diào)頻技術(shù)來實現(xiàn),主要以多普勒頻移原理為基礎(chǔ)。
角度的探測是通過多個接收天線接收到信號的時延來實現(xiàn)。舉個簡單的例子,假設有2根天線,接收從某個方向發(fā)出的電磁波,這個電磁波到達2根天線的時間是有差值的,或者說是相位差,通過這個相位差可以評估信號的角度。
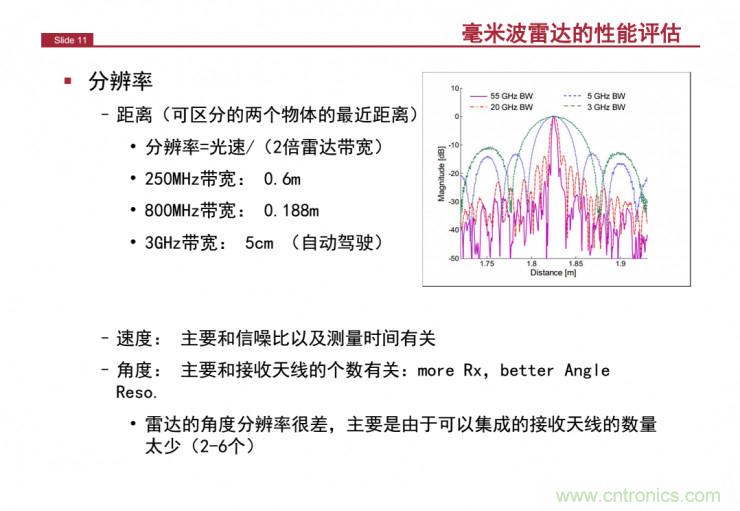
這里要引入一個非常重要的概念——毫米波雷達的分辨率。其定義是“雷達可以區(qū)分的兩個物體的最近的距離”,比如,兩個物體靠得很近,那么雷達可能會將其列為一個物體,如果分得開一些,雷達會看到兩個物體。那么究竟離多遠雷達能區(qū)分兩個物體間的距離,這個就叫做雷達的分辨率。
分辨率的計算公式也很簡單,就是光速/2倍的雷達帶寬,所以對于24GHz和77GHz來說,可以直接算出其分辨率。前者是0.6m,后者則約為20cm。而3GHz帶寬的毫米波雷達的分辨率可以做到5cm,非常適合自動駕駛的應用。
此外,在關(guān)鍵性的天線技術(shù)方面,毫米波雷達有兩種,一種是基于透鏡,另一種是用PCB印刷?;谕哥R的天線開發(fā)靈活度較小,因為最后會聚焦到一個很小的區(qū)域,這個區(qū)域不大容易安排靈活的設計。
四、未來
總體來說,毫米波雷達成本下降的速度還是比較快的,因為它是硅基的芯片,沒有特別昂貴和復雜的工藝。而激光雷達則在光的收發(fā)器和組裝工藝要求高,成本比較難降下來。
激光雷達目前還有一個非常重要的技術(shù)是固態(tài)激光雷達,它實際上與傳統(tǒng)雷達、毫米波雷達是一脈相承的,固態(tài)激光雷達實質(zhì)上就是調(diào)整每個發(fā)射和接收單元的相位,毫米波雷達也是同樣的原理,只不過毫米波雷達是對電磁波進行操作,器件的實現(xiàn)難度要比對光的頻段上進行相位的改變的難度低很多。
而對于毫米波雷達的市場前景。一輛車上會搭載3-8顆毫米波雷達,目前奔馳的高端車上也已經(jīng)安裝了7顆。未來10年,車載毫米波雷達的市場規(guī)模將不容小覷。
從政策上來講,各個國家都在推進汽車的AEB功能,其中日本和北美已經(jīng)在推行,中國也將在2018年推行到商用車領(lǐng)域。
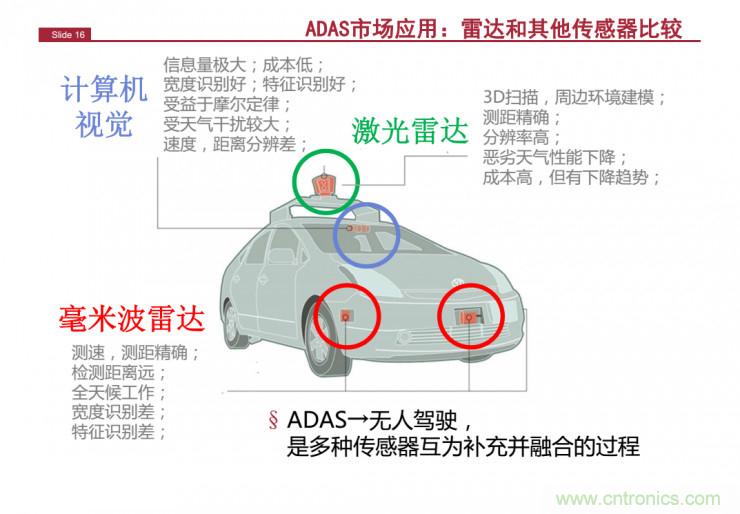
毫米波雷達在ADAS領(lǐng)域是很難被取代的傳感器,雖然有一些缺點,但是是唯一的全天候工作的傳感器。其測速、測距的精度要遠高于視覺,與激光雷達相比,其測速精度會高一些。穿透力會更好。但是整體來講,這并不沖突,因為未來會走向融合的趨勢,特別是針對無人駕駛,毋庸置疑三大傳感器會相互融合。
本文來源于雷鋒網(wǎng)。
推薦閱讀:




